Podstawy Automatyki
Rozdz. 21 Regulacja dwupołożeniowa
Rozdz. 21.1 Wstęp
Zanim poznamy regulację PID, to omówimy w tym rozdziale działanie najłatwiejszej regulacji –regulacji dwupołożeniowej.
Zaczniemy od przekaźnika oraz związanego z nim pojęcia tzw. histerezy.
Rozdz. 21.2 Przekaźnik jako element dwupołożeniowy bez histerezy
Rys. 21-1
Algorytm przekaźnika jest banałny
x(t>0–>załącz
x(t)<0–>wyłącz
W zależności od tego co jest podłączone do styków przekaźnika załącz i wyłącz oznacza co innego. Tu np.
załącz–>y(t)=1–>U=∼230V grzanie
wyłącz–>y(t)=0–>U=0 chłodzenie*
*chłodzenie może być też bardziej intensywne. np. włączenie sprężarki lodówki
Animacja jest tak jednoznaczna, że nie wymaga dalszych komentarzy.
Rozdz. 21.3 Przekaźnik jako element dwupołożeniowy z histerezą
Rys. 21-2
Typowy przekaźnik załącza np. przy +5V a wyłącza przy np. +4,8V. Bardziej użyteczna w automatyce będzie taka charakterystyka przekaźnika, który załącza się przy pewnych wartościach dodatnich a wyłącza przy ujemnych. Tu załącza dla x(t)=+0.2 a wyłącza gdy x(t)=-0.2. Ten twór musi być wspomagany jakąś prostą elektroniką, w szczegóły której nie będziemy wchodzić.
Sygnał wewnątrz paska -0.2…+0.2 może się zmieniać „wte i we wte” i nie wpływa na sygnał wyjściowy. Może nawet wrócić tam skąd przyszedł i ponownie „bezkarnie” wróć do paska. „Bezkarnie” to znaczy bez zmiany stanu przekaźnika.
Rozdz. 21.4 Człowiek jako Regulator Dwupołożeniowy
Narysujmy schemat sterowania z Tobą jako regulatorem.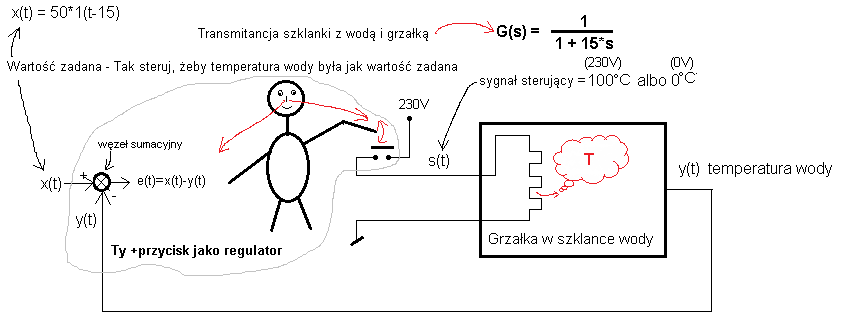
Rys. 21-3
Ty jako regulator, poprzez włączanie i wyłączanie grzałki, starasz się utrzymać temperaturę wody y(t)=+50°C. Ponieważ jesteś wybitnym elektronikiem, to wpadłeś na genialny pomysł, żeby „wkładanie i wyjmowanie” wtyczki grzałki do kontaktu, zastąpić przyciskiem sterującym o stykach normalnie otwartych–>czyli takich które bez napięcia są rozwarte.
Algorytm sterowania jest banalny.
– x(t)>y(t) –> włącz grzałkę
– x(t)<y(t) –> wyłącz grzałkę
Ponieważ e(t)=x(t)-y(t) to w/w algorytm zastąpimy takim:
– e(t)>0 –> włącz grzałkę
– e(t)<0 –> wyłącz grzałkę
Sygnał sterujący Włącz grzałkę odpowiada sygnałowi s(t)=230V. Moc grzałki jest tak dobrana, że temperatura wody w stanie ustalonym osiągnie y(t)=+100°C. Gdyby moc tej grzałki była trochę mniejsza, to otrzymamy niższą temperaturę. np. y(t)=+99°C. Dlatego polecenie włącz grzałkę można zastąpić „umownym” sygnałem sterującym s(t)=+100°C.
Analogicznie wyłącz grzałkę można zastąpić s(t)=0°C. Zakładamy, że temperatura powietrza wokół szklanki to 0°C. Czyli przy wyłączeniu grzałki temperatura wody będzie dążyła do 0°C.
Algorytm sterownia będzie teraz taki:
e(t) = x(t)-y(t)
– e(t)>0 –>s(t)=+100°C (włącz grzałkę)
– e(t)<0 –> s(t)=0°C (wyłącz grzałkę)
Wartość e(t) nazywana jest uchybem regulacji i „obliczana” jest w Twojej głowie, która pełni funkcję tzw. węzła sumacyjnego.
Proces jest szybki i nie jesteś w stanie obliczyć , że np. w danej chwili uchyb e(t)=50°C-37.5°C=12.5°C. Wynika to z Twojej niedoskonałości. Możesz tylko w przybliżeniu stwierdzić znak uchyb e(t). Wtedy z pewnym opóźnieniem, bo nie masz refleksu szermierza, podejmujesz decyzję co do włączenia/wyłączenia napięcia na grzałce.
Poznałeś najważniejsze pojęcia automatyki
– Wartość zadana x(t) Wartość którą regulator stara się utrzymać na wyjściu obiektu. Tu temperaturę +50°C
– Sygnał wyjściowy y(t) Wartość na wyjściu obiektu, którą udało się zapewnić regulatorowi
– Uchyb e(t)=x(t)-y(t) Jest miarą „niedoskonałości” regulatora. Dla idealnego powinno być e(t)=0. Obliczany jest w tzw. węźle sumacyjnym.
– Sygnał sterujący s(t) Podawany jest bezpośrednio na wejście obiektu.
Idealny regulator zapewnia taką samą wartość y(t) na wyjściu, jak wartość zadana x(t). Czyli zapewnia e(t)=0.
Tak jak każdy ideał, regulator idealny nie istnieje. Może to i dobrze? Gdybyś znalazł się w pociągu, którego prędkość zmienia się skokowo, to przyspieszenie byłoby przez chwilę nieskończenie wielkie. Źle by się to skończyło
Rozdz. 21.5 Układ regulacji dwupołożeniowej
Układ ręcznego sterowania z Rys. 21-3 łatwo zastąpimy układem sterowania automatycznego . Rolę węzła sumacyjnego pełni wzmacniacz operacyjny WO. Wykonuje on operację e(t)=x(t)-y(t)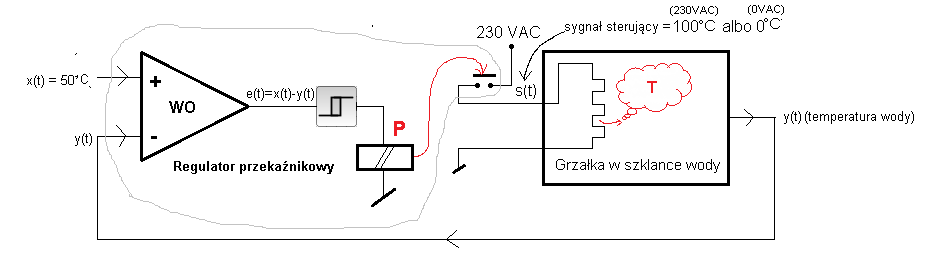
Rys. 21-4
Układ sterowania automatycznego z przekaźnikiem
Robi to samo co Ty na Rys. 21-3, tylko dokładniej i bardziej jednoznacznie.
Trochę zmodyfikujemy algorytm sterowania. Po co? Wyjaśni się za chwilę.
– e(t)>+5°C –>s(t)=+100°C (włącz grzałkę)
– e(t)<-5°C –> s(t)=0°C (wyłącz grzałkę)
Włączanie zachodzi przy innej wartości niż wyłączanie. Do tego właśnie służy histereza , którą poznałeś wcześniej.
Rozdz. 21.6 Badanie Regulacji Dwupołożeniowej
Rozdz. 21.6.1 Wstęp
Będziemy badać jaki wpływ na sterowanie ma:
– Wartość zadana x(t)
– Histereza
– Moc grzejna
– Moc chłodząca
Rozdz. 21.6.2 Wartość zadana skokiem x(t), histereza +5/-5
Rys. 21-5
Schemat jest odwzorowaniem schematu z Rys. 21-4 . To gdzie podział się przekaźnik ze stykiem i napięciem 230V? Po prostu założyłem, że wszystko mieści się w członie z histerezą. Ustawiłem w nim histerezę -5°C…+5°C i sygnały sterujące s(t)=0°C i s(t)=100°C jako odpowiedniki zał gdy e>+5º i wył. gdy e<-5º. W ten sposób sygnał wyjściowy y(t) będzie wzrastał do +100ºC (zanim zacznie opadać) i spadał do 0ºC (zanim zacznie wzrastać) wokół skokowego sygnały wartości zadanej x(t).
Pierwsze włączenie jest oczywiste bo e(t)>+5°C. Temperatura y(t) zaczyna narastać a uchyb e(t) najpierw skoczy do +50°C a potem maleje. Potem nastąpi seria wyłączeń gdy gdy e<-5º i włączeń gdy e>+5º. w ten sposób wyjście-temperatura y(t), będzie oscylować w zakresie -45°C…+55°C, czyli wokół +50°C.
Rozdz. 21.6.3 Wartość zadana „schodkami”, histereza +5/-5
A co będzie gdy wartość zadana x(t) będzie się zmieniała w czasie trwania eksperymentu?
Rys. 21-6
Badamy ten sam układ, tylko jest inny przebieg czasowy wartości zadanej x(t).
Musisz być też cierpliwy, eksperyment trwa 3 minuty zamiast jednej.
Z przebiegów wynika że gdy:
x(t)=0°C to 0% mocy maksymalnej (brak grzania)
x(t)=+25°C to 25% średniej mocy maksymalnej (w stanie ustalonym 25% czasu grzanie 75% czasu chłodzenie)
x(t)=+50°C to 50% średniej mocy maksymalnej (w stanie ustalonym 50% czasu grzanie 50% czasu chłodzenie)
x(t)=+75°C to 75% średniej mocy maksymalnej (w stanie ustalonym 75% czasu grzanie 25% czasu chłodzenie)
x(t)=+100°C to 100% średniej mocy maksymalnej (w stanie ustalonym 100% czasu grzanie i brak chłodzenia) Ostatniego doświadczenia nie robiliśmy, ale łatwo to sobie wyobrazić.
Nie przeprowadzaliśmy dokładnej analizy cieplnej szklanki wody ze szklanką. Ciepło właściwe wody, szkła i inne kalorie. Jedyna rzecz o którą zadbaliśmy, to minimalna moc grzałki, która zapewni ogrzanie wody do 100°C. A mimo to układ dostarcza tyle energii do szklanki co potrzeba. Czyli automatyka pozwala sterować obiektem, nie do końca przez nas rozpracowanym.
Regulator „zmusza” czerwony sygnał wyjściowy y(t) do naśladowania czarnego sygnału wartości zadanej x(t). Miarą niedoskonałości regulatora jest zielony sygnał uchybu e(t). Efekt tego „zmuszania” przejawia się tym, że zielony uchyb e(t) zawsze dąży do stanu, w którym znajdzie się wewnątrz paska histerezy -5°C…+5°C.
Kiedyś wspominałem, że idealny regulator odtwarza dokładnie na wyjściu y(t) wartość zadaną x(t. Wtedy zielony uchyb e(t) byłby cały czas zerowy. Nie spodziewałem się co prawda aż takiego ideału, ale przebieg y(t) nie rzuca na kolana. Chociaż sygnał wyjściowy y(t) przynajmniej stara się odtwarzać sygnał wejściowy.
Główne zarzuty dla oskarżonego regulatora to:
-drgania temperatury na wyjściu („ząbki”)
-zbyt wolne dochodzenie do wartości zadanej. Spróbujmy coś wykombinować żeby było lepiej. Najpierw ząbki.
Rozdz. 21.6.4 Wartość zadana impuls prostokątny, histereza +1/-1
Rys. 21-7
Schemat różni się od Rys. 21-5 następująco:
– 5 razy mniejsza histereza-ledwo widoczna jak żółte linie +1 i -1
– Impuls zamiast skoku jednostkowego.
Zmniejszenie histerezy powoduje zmniejszenia drgań („ząbków”) na wyjściu. Ledwo widać teraz pasek z żółtymi liniami histerezy +1…-1. Niestety, w życiu nic za darmo. Gdy regulator steruje np. stycznikami, to takie „kłapanie” co sekundę prędko je wykończy. A gdyby zastosować przełączanie półprzewodnikowe (triaki, tranzystory,tyrystory…)? Można tak przy sterowaniu grzałką . Ale gdy po drodze jest np. silnik elektryczny jak w lodówce? Wtedy trzeba być ostrożnym. Poza tym możemy zmniejszyć histerezę nawet do zera (przekaźnik idealny), a drgania pozostaną. A to dlatego, że człony człony dynamiczne typu „piec”, oprócz inercji T mają jeszcze opóźnienie To.
Zwróć jeszcze uwagę na „wolniejsze” opadanie y(t) po 30 sek niż jego „szybsze” narastanie po po 5 sek. Sprawa jest prosta. Po 5 sek wartością początkową jest y(t)=0°C a celem do którego dąży jest y(t)=+100°C. Po 30 sek wartością początkową jest y(t)=+50°C a celem do którego dąży jest y(t)=0°C. Cel jest teraz 2 razy mniej ambitny i dlatego y(t) jest 2 razy wolniejszy.
Udało nam się zmniejszyć „ząbki”. Czas teraz zająć się więc szybszym dochodzeniem do temperatury zadanej +50°C.
Rozdz. 21.6.5 Wartość zadana impuls prostokątny, histereza +5/-5,zwiększone grzanie
Rys. 21-8
Ze względów dydaktycznych wróciliśmy do poprzedniej „szerszej” histerezy. Po prostu łatwiej wtedy zauważyć, co się dzieje. Rozwiązanie problemu samo się narzuca. Zwiększona została 2.5 razy moc grzałki – wyjście „dodatnie” członu z histerezą zostało zwiększone do +250°C. Czyli tak jakby woda miała teraz dochodzić w czasie grzania do +250°C a nie do +100°C. Nie dyskutujmy o tym, że przy zwykłym ciśnieniu maks. temp. dla wody to +100°C itd… Wiemy o co chodzi.
Z oczywistych powodów temperatura dochodzi teraz dużo szybciej do +50°C. Pomimo użycia mocniejszej grzałki, za energię zapłacimy mniej więcej tyle samo. Choć impulsy „grzejące” mają teraz większą amplitudę, to trwają krócej niż poprzednia. Energia, czyli pole sygnału sterującego s(t) pozostanie z grubsza bez zmian.
Temperatura szybko dochodzi do wartości zadanej +50°C. Było to wymuszone „mocniejszym” grzaniem. Natomiast powrót do 0°C trwa tak samo długo co poprzednio. Teraz i wtedy chłodzenie następuje poprzez przerwanie dopływu mocy.
A gdyby tak dodatkowo chłodzić, zamiast zwykłego przerwania mocy?
Rozdz. 21.6.6 Wartość zadana impuls prostokątny, histereza +5/-5,zwiększone grzanie i chlodzenie
Idźmy na całość, dajmy chłodzenie -250°C!. Czyli zamiast tylko wyłączać grzałkę, przepuszczam np. przez wężownicę jakiś skroplony gaz o temp. -250°C!
Załóżmy jeszcze jedno. W szklance mamy nie wodę, tylko jakąś ciecz, którą można ochłodzić do -250°C i podgrzać do +250°C.
Po co to założenie? Żeby nie wchodzić w dywagacje typu, co się będzie działo poniżej 0°C, gdy woda zamarznie i powyżej +100°C gdy woda wrze.
Schemat jest podobny do Rys. 21-8, tylko człon histerezy dla e<-5°C daje teraz -250°C (zamiast 0°C). Możesz go zresztą zobaczyć na Rys.21-10.
Rys. 21-9
Zaczynam się bać, stworzyliśmy Frankensteina. Najważniejsze, że cel został osiągnięty. Temperatura szybko dochodzi do +50°C i do 0°C. Ale jakim kosztem. Dla x(t) = 0°C są cały czas drgania, o wypełnieniu 50%. Przecież to cały czas żre energię!
Czasami stosuje się regulację z aktywnym grzaniem i chłodzeniem. Np. dla komór chłodniczych służącej do testowania części samolotowych, które w ciągu kilku minut przechodzą z temperatury np. +30°C do -70°C. Tu sobie przypomniałem moją pierwszą pracę w Instytucie Lotnictwa.
Niebieski sygnał sterujący trochę zamula obraz. To pokażmy to samo, ale tylko dla 2 sygnałów x(t) i y(t).
Uwaga:
Zerową temperaturę y(t)=0ºC zapewniają naprzemienne impulsy +250ºC i -250ºC. To katastrofa pod względem sprawności energetycznej, za to takie sterowanie zapewnia najlepszą dynamikę procesu.
Rys. 21-10
Odpowiednik Rys. 21-9 tylko dla dwóch najważniejszych sygnałów. Widać jak temperatura na wyjściu y(t) „słucha się”, a właściwie stara „słuchać się” wartości zadanej x(t). Sygnału sterującego s(t), który zamulał obraz na Rys. 21-9 nie ma, ale możesz sobie go wyobrazić obserwując “ząbki” y(t):
s(t)=+250°C gdy y(t) rośnie
s(t)=-250°C gdy y(t) maleje
A gdy wartość zadana zmienia się kilka razy?
Rozdz. 21.6.7 Wartość zadana-„schodki”, histereza +5/-5,zwiększone grzanie i chłodzenie
Będzie to schemat uproszczony, tylko z 2 sygnałami x(t) i y(t). Teraz pojedynczy impuls x(t) z Rys. 21-10j zastąpiony został “schodkami”.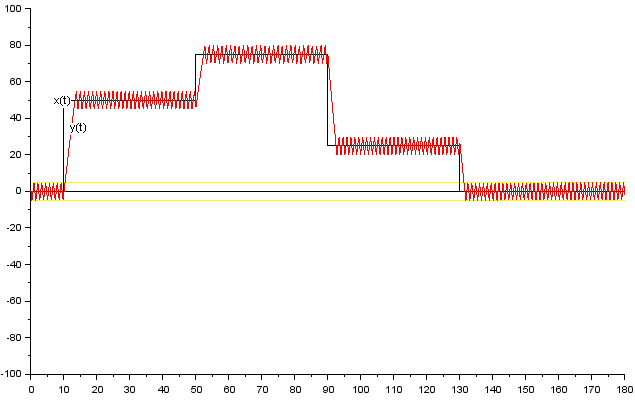
Rys. 21-11
Pięknie widać jak y(t) słucha x(t). Może trochę denerwujące jest zjawisko „ząbków”. Wynika to z bardzo dużej histerezy -5…+5 która została ustawiona tylko ze wzgłędów dydaktycznych. Gdybyśmy dali -1…+1 to drgania byłyby mniejsze i o większej częstotliwości. Widziałbyś czerwoną linię o grubości -1…+1.
Sterowanie s(t) jest też trochę straszne. Ciecz w szklance (nie woda!) jest co ok sekundę podgrzewana w kierunku +250°C i chłodzona w kierunku -250°C. Ale cel został osiągnięty! Temperatura y(t) bardziej się „słucha” x(t) niż na Rys. 24-15, gdzie było sterowanie „łagodniejsze” +100°C/0°C. Odpowiada to ogólnej zasadzie automatyki. Silniejsze ujemne sprzężenie zwrotne powoduje dokładniejsze i szybsze sterowanie. Oczywiście, o ile się nie przesadzi doprowadzając do niestabilności
Regulator stara się by temperatura wody była równa wartości zadanej x(t).
Robi to co prawda metodą prymitywną:
za zimna –>grzać
za ciepła–>chłodzić
,ale z grubsza mu to wychodzi.
A gdyby tak zamiast wody była rtęć? Rtęć ma większe ciepło właściwie, czyli ludzkim głosem – dłużej się ogrzewa i chłodzi. Byłby dłuższy czas dochodzenia do wartości zadanej, ale też by stabilizował. Dlaczego? Bo regulatora nie interesuje co grzeje, tylko podejmuje decyzję sterującą na podstawie aktualnej temperatury.
A gdyby do szklanki dolać trochę zimnej cieczy? Regulator nie będzie nawet wiedział, co było przyczyną spadku temperatury, tylko podejmie decyzję dodatkowego grzania. I znowu będzie starał się utrzymywać temperaturę wody na wartości równej wartości zadanej.
Zapomniałem dodać, że wszystko się uda pod warunkiem, że zapewnimy właściwą moc grzałki. Nie da się przecież małą grzałką „szklankową” zasilanej z bateryjki, utrzymywać temperatury wody w wannie na poziomie np. +50°C , nawet gdyby regulator kazał cały czas grzać.
W ten sposób dochodzimy do podstawowego zadania automatyki. Jest nim tłumienie zakłóceń.
Rozdz. 21.7 Zakłócenie w układzie otwartym
21.7.1 Wstęp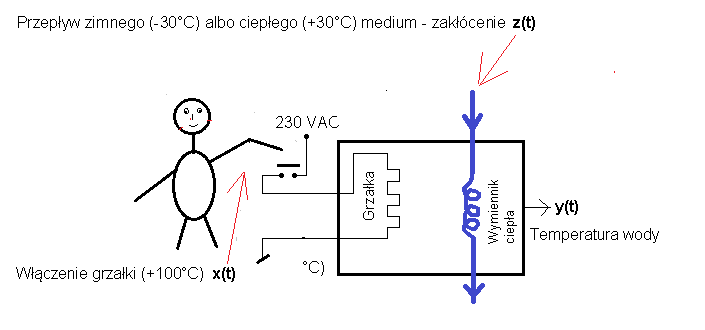
Rys. 21-12
Szklanka wody z 2 sygnałami wejściowymi
x(t) sygnał sterujący od grzałki
z(t) sygnał zakłócający od wymiennika
oraz
z 1 sygnałem wyjściowym
y(t) temperatura wody
Temat zakłóceń dotyczy każdego rodzaju regulacji, nie tylko dwupołożeniowej. Pamiętaj o tym gdy przejdziemy do regulacji ciągłej PID
Jak się przekonasz, układ otwarty jest zupełnie nieodporny na zakłócenia. Wyobraź sobie, że Twoja lodówka nie ma termostatu, tylko cały czas pracuje pełną mocą.
Poddamy analizie szklankę z wodą która ma 2 sygnały wejściowe. Sygnał x(t) sterujący grzałką, oraz zakłócenie z(t), pochodzące od spiralnej rurki z cieczą która podgrzeje w stanie ustalonym o +30°C albo ochłodzi o -30°C.
Podkreślam – z(t)=+30°C to nie temperatura w wymienniku, tylko „podbicie” z temperatury +100°C pochodzącej od grzałki elektrycznej do +130°C! W ten sposób unikamy problemów związanych z temperaturą cieczy w wymienniku, konstrukcji samej spirali itd… Przecież to nie jest kurs o wymiennikach cieplnych. Analogicznie jest z z(t)=-30°C.
Dalszym uproszczeniem jest to, że „woda” nie paruje ani nie zamarza i jest w stanie osiągnąć każdą temperaturę, nawet z(t)=-300°C!
W naszych 4 doświadczeniach będą 3 przedziały czasowe A,B i C.
W przedziale A jest zawsze x(t)=+100°C, czyli grzałka jest włączona na full.
W przedziale C jest zawsze z(t)=+30°C albo z(t)=-30°C . Czyli wymiennik grzeje albo chłodzi.
Za to w przedziale B grzałka może się „spotkać” albo i nie z wymiennikiem.
Rozdz. 21.7.2 Zakłócenie +30°C i sygnał z grzałki +100°C rozdzielone w czasie
Rys. 21-13
Przez wymiennik od 210 sekundy będzie przepływała ciecz +30°C. Dzięki temu, że działania grzałki i wymiennika są rozdzielone w czasie, możemy porównać wpływ grzałki jako sterowania i wymiennika jako zakłócenia z(t). Moc znamionowa wymiennika jest taka sama jak grzałki. Jak to? Przecież grzałka grzeje do +100°C a wymiennik tylko do +30°C. No tak, ale gdybyśmy przez wymiennik przepuścili ciecz +100°C, to przebiegi czasowe byłyby takie same. Gdyby moc znamionowa wymiennika była 2 razy mniejsza –> 2 razy mniej zwojów w wymienniku, to ciecz w wymienniku +30°C spowodowałaby wzrost temperatury cieczy w szklance tylko do +15°C. Dokładniej, byłaby to trochę wyższa temperatura np. +17°C
Rozdz. 21.7.3 Zakłócenie +30°C i sygnał z grzałki +100°C jednocześnie
Schemat jest identyczny jak na Rys. 21-13, tylko parametry bloków wymiennika i grzejnika są tak ustawione, że w czasie 120…210 sek włączone są jednocześnie grzałka i wymiennik
Rys. 21-14
Dla t = 110…210 sek sygnały z grzałki i wymiennika się dodadzą i temperatura dojdzie do +130°C. Dla t >210 sek wyłączony jest grzejnik, ale temperatura spadnie tylko do +30°C (a nie do 0°C), bo włączony jest jeszcze wymiennik.
Rozdz. 21.7.4 Zakłócenie -30°C i sygnał z grzałki+100°C rozdzielone w czasie
Rys. 21-15
Proponuję samodzielną interpretację przebiegu
Rozdz. 24.7.5 Zakłócenie -30°C i sygnał z grzałki +100°C jednocześnie
Rys. 21-16
Proponuję samodzielną interpretację przebiegu
Rozdz. 21.8 Tłumienie zakłóceń-główny cel ujemnego sprzężenia zwrotnego
Rozdz. 21.8.1 Wstęp
Włóż do szklanki z Rys. 21-16 miniaturowy wymiennik ciepła – inaczej spiralną mosiężną rurkę.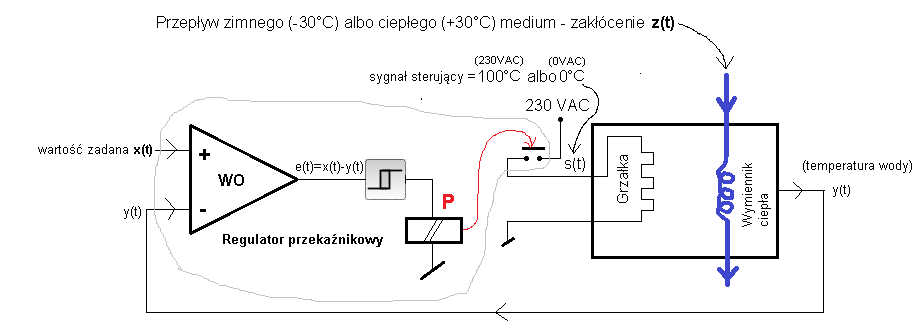
Rys. 21-17
Układ regulacji z zakłóceniem.
Głównym celem każdej regulacji (nie tylko dwupołożeniowej) jest tłumienie zakłóceń. Dzięki temu w lodówce masz stałą temperaturę latem i zimą. Automatyczny pilot prowadzi po linii prostej niezależnie od zakłócenia-wiatru itd. Na rysunku zakłócenie dodatnie z(t)=+30°C i ujemne z(t)=-30°C zostały już opisane w poprzednim rozdz. 21.6. Spodziewamy się, że pomimo zakłóceń średnia temperatura na wyjściu się nie zmieni.
Rozdz. 21.8.2 Badanie układu regulacji automatycznej z zakłóceniem dodatnim z(t)=+30°C
W 5 sekundzie pojawi się wartość zadana temperatury +50°C, która cały czas będzie stała. Zakłócenie z(t)=+30°C (gorący przepływ przez spiralę) wystąpi w 35 sek. Czy dodatnie zakłócenie zostanie skompensowane średnim spadkiem mocy na grzałce?
Rys. 21-18
Do 35 sekundy nie ma zakłócenia, czyli przebieg jest taki sam jak na Rys. 21-5. W 35 sekundzie wystąpiło zakłócenie z(t)=+30°C.
Dalsza analiza jest podobna jak bez zakłóceń tylko:
– przy włączeniu temperatura szybko dąży do +130°C=100°C+30°C (bo działa grzałka + wymiennik)
– przy wyłączeniu temperatura wolno dąży do +30°C (a nie do temperatury otoczenia, bo działa jeszcze wymiennik)
Są więc krótkie włączenia i długie wyłączenia grzałki. Średnia moc dostarczona do wody została więc zmniejszona. Tak czy owak histereza przekaźnika trzyma temperaturę w tym samym pasie -5°C…-+5°C co przed zakłóceniem.
Uwaga
Układ z zakłóceniem z zakłóceniem z=+30°C możemy traktować jak bez zakłócenia, z tym że moc za przekaźnikiem jest podwyższona o +30°C.
Tzn. zamiast
zał.=+100°C jest zał.=+130°C
wył.=0°C jest wył.=+30°C
Rozdz. 21.8.3 Badanie układu regulacji automatycznej z zakłóceniem ujemnym
Schemat różni się od poprzedniego tylko zakłóceniem z(t).
Poprzednio było grzanie z(t)=+30ºC
Teraz jest chłodzenie z(t)=-30ºC
Czy zakłócenie zostanie skompensowane dodatkową mocą na grzałce?
Rys. 21-19
Do 35 sekundy nie ma zakłócenia, czyli przebieg jest taki sam jak na Rys. 21-5. W 35 sekundzie wystąpiło zakłócenie z(t)=-30°C.
Dalsza analiza jest podobna jak bez zakłóceń tylko:
– przy włączeniu temperatura wolno dąży do +70°C=100°C-30°C (bo grzeje grzałka i chłodzi wymiennik)
– przy wyłączeniu temperatura szybko dąży do -30°C (bo chłodzi jeszcze wymiennik)
Są więc długie włączenia i krótkie wyłączenia grzałki. Średnia moc dostarczona do cieczy została więc zwiększona. I znowu histereza przekaźnika trzyma temperaturę w tym samym pasie +5°C…-+5°C co przed zakłóceniem.
Uwaga
Układ z zakłóceniem z zakłóceniem z=-30°C możemy traktować jak bez zakłócenia, z tym że moc za przekaźnikiem jest obniżona o -30°C.
Tzn. zamiast
zał.=+100°C jest zał.=+70°C
wył.=0°C jest wył.=-30°C
Rozdz. 21.9 Posumowanie regulacji dwupołożeniowej
Jest to najłatwiejsza regulacji która działa wg. zasady
wyjście za małe–> steruj MAX
wyjście za duże–> steruj MIN
Poznaliśmy podstawowe pojęcia automatyki – wartość zadana, sygnał wyjściowy, uchyb regulacji, sygnał sterujący i zakłócenie.
Jak w każdym Układzie Regulacji Automatycznej, wartość sygnału wyjściowego dąży do wartości zadanej. Nawet wtedy gdy działają zakłócenia.
Gdybyś dzisiaj zakończył naukę o regulatorach, to traktuj inne regulatory np. PID, jak dwupołożeniowe! Najważniejszy efekt ich działania jest taki sam –>tłumią zakłócenia. Inna rzecz, że Regulacja Dwupołożeniowa robi to w sposób prostacki–>włącz/wyłącz.
Objawy są takie, że sygnał wyjściowy y(t) cały czas faluje z amplitudą tym większą, im większe są bezwładności i opóźnienia obiektu oraz nastawiona histereza regulatora. Inna rzecz, że w wielu sytuacjach nam to nie przeszkadza. W lodówce te wahania temperatury to pojedyncze Celsjusze. Szynka, jaja i pomidory nawet tego nie odczują.