Podstawy Automatyki
Rozdz. 16 Jak Działa Sprzężenie Zwrotne?
Rozdz. 16.1 Wstęp
Sprzężenie zwrotne polega na tym, że sygnał wyjściowy y(t) wraca z powrotem na wejście.
Rys.16-1
Rys. 16-1a
Sygnał y(t) z wyjścia wraca bezpośrednio na wejście. Ale co w takim razie jest przyczyną a co skutkiem? Czy jajko było pierwsze czy kura? Że już nie powiem o bardziej egzystencjalnych pytaniach. Potraktujmy więc schemat jako ciekawostkę.
Rys.16-1b
Czyli potrzebny jest jakiś kontakt ze światem zewnętrznym. Realizowane jest jako różnica e(t)=x(t)-y(t) w tzw. węźle porównującym. Jest to najważniejszy schemat w automatyce ponieważ y(t) stara się naśladować x(t). To musi być dla Ciebie tak oczywiste i instynktowne, jak jazda na rowerze! Poznanie mechanizmu tego naśladowania jest głównym celem tego rozdziału.
Rozdz. 16.2 Jak działa dodatnie sprzężenie zwrotne?
Rozdz.16.2.1 Wstęp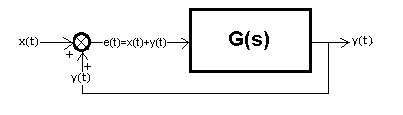
Rys. 16-2
Dodatnie sprzężenie zwrotne.
Czyli takie w którym na wejście podawana jest suma sygnałów e(t)=x(t)+y(t) zamiast różnicy jak na Rys. 16-1b. Jest to raczej coś szkodliwego. Wypadek przy pracy. Np. gdy monterowi pomylą się kabelki, i zamiast na wejście „-„ regulatora, wejdzie na wejście „+”. Jest łatwiejsze do zrozumienia niż ujemne sprzężenie zwrotne i tylko dlatego analizujemy ten przypadek.
Rozdz. 16.2.2 Dodatnie sprzężenie zwrotne „duże”
Dlaczego „duże”? Dowiesz się, gdy będzie mowa o „małym”.
Jest to wersja Rys. 16-2 gdy G(s) to człon inercyjny o parametrach K=1.5, T=3 sek. Sygnał z wyjścia wraca na wejście i dodaje się do sygnału wejściowego x(t)-„szpilki” albo inaczej „prztyczka”. Zauważ że K=1.5>1!
Wciśnij „start”
Rys. 16-3
Na wejście bloku inercyjnego wchodzi suma sygnałów s(t)=x(t)+y(t). Początkowo x(t)=y(t)=0. Czyli s(t)=0+0 =0 i nic się nie dzieje. Ale w piątej sekundzie pojawia się „szpilka”. Ot, taki mały prztyczek. Sygnał ten przejdzie przez człon inercyjny jako „stłumiona szpilka” o mniejszej amplitudzie i zwiększona 1.5 razy . Na początku ta „stłumiona szpilka” jest tak mała, że nie widać jej na wykresie, ale natychmiast wróci na wejście i ponownie będzie zwiększona 1.5 razy. Znowu wróci i ponownie będzie zwiększona 1.5 razy…itd. Klasyczny efekt lawinowy. Układ od samego początku był niestabilny, chociaż do piątej sekundy nie było tego widać. Ale wystarczył mały „prztyczek”, aby nastąpiła katastrofa.
W automatyce unika się dodatnich sprzężeń zwrotnych. Natomiast w życiu społecznym, ekonomii… nie zawsze się uda. Typowy przykład to giełda. Wydaje się, że dana firma jest stabilna. Wystarczy plotka (odpowiednik „szpilki”), że jej akcje zaczną rosnąć. Jak rosną to ludzie kupują–> tym bardziej rosną –> tym bardziej kupują…itd.
Powracając do naszego przykładu to moglibyśmy postawić taką hipotezę. Układ ze sprzężeniem zwrotnym dodatnim jest zawsze niestabilny. Dowolne wytrącenie go z równowagi powoduje że sygnał rośnie do +/- nieskończoności. Czy zawsze tak jest? Sprawdźmy na następnym przykładzie.
Rozdz. 16.2.3 Dodatnie sprzężenie zwrotne „małe”
Dlaczego „małe”? Poprzednio licznikiem transmitancji było 1.5>1. A gdy licznik jest mniejszy od 1, np. 0.8? Sprawdź to.
Uprzedzę fakty. Pomimo dodatniego sprzężenia zwrotnego, układ będzie stabilny. Dlatego możemy sobie pozwolić na wejście x(t) typu skokowego.
Rys. 16-4
Tu licznikiem transmitancji G(s) jest 0.8. Albo inaczej – wzmocnienie w stanie ustalonym układu otwartego (czyli przed zamknięciem pętli sprzężenia zwrotnego) K=0.8 zaś T=3sek. Odpowiedź układu zamkniętego przypomina człon inercyjny . I tak jest! W takim razie wyznaczmy z wykresu wzmocnienie Kz tego układu oraz jego jego stałą czasową Tz patrz–> Rys. 3-4 Rozdz.3.
Wynik Kz=4 i Tz=15 sek mówi nam, że dodatnie sprzężenie zwrotne zwiększa:
–wzmocnienie z K=0.8 na Kz=4
–stałą czasową z T=3 sek na Tz=15 sek – czytaj większa bezwładność
Dawno temu, gdy nie było jeszcze elektroniki, tylko radiotechnika, a lampy i tranzystory były bardzo drogie, dodatnie sprzężenie było wykorzystywane do zwiększenia wzmocnienia. Niestety, kosztem większej bezwładności czyli kosztem ograniczenia pasma przenoszenia. W następnym punkcie udowodnimy, że jest to rzeczywiście człon inercyjny. Teraz tylko przypuszczamy, że tak jest. A wniosek jest taki, że układ z dodatnim sprzężeniem zwrotnym może być stabilny!
Rozdz. 16.2.4 Transmitancja Gz(s) układu z dodatnim sprzężeniem zwrotnym
Wyprowadź wzór na Gz(s) dla układu z dodatnim sprzężeniem zwrotnym.
Pomocny w tym będzie Rys. 15-13 rozdz15. Zamiast E(s)=X(s)-Y(S) wstaw E(s)=X(s)+Y(s).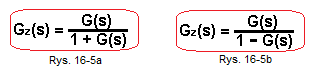
Rys. 16-5
W celu porównawczym pokazano Gz(s) układu z ujemnym sprzężeniem zwrotnym –> Rys. 16-5a.
Jeżeli udało Ci się wyprowadzić wzór dla dodatniego sprzężenia zwrotnego to otrzymasz–> Rys. 16-7b.
Sprawdźmy ten wzór np. dla transmitancji z Rys. 16-3 i Rys. 16-4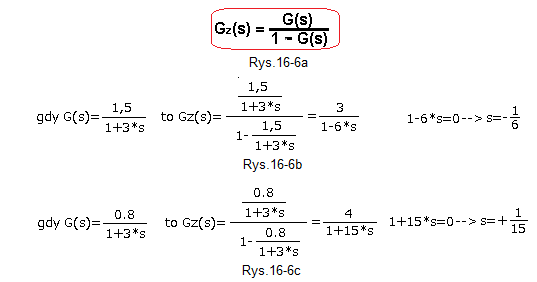
Rys. 16-6
Rys. 16-6a – transmitancja układu z dodatnim sprzężeniem zwrotnym
Rys. 16-6b – przykład gdy K=1.5>1 tak jak na Rys.16-3. Układ jest niestabilny. Pierwiastek mianownika jest dodatni.
Rys. 16-6c – przykład gdy K=0.8<1 tak jak na Rys.16-4. Układ jest stabilny. Pierwiastek mianownika jest ujemny.
Tu mianownik był wielomianem stopnia n=1. Nasze spostrzeżenie można uogólnić na dowolny wielomian stopnia n.
Przy okazji poznaliśmy jedno z podstawowych twierdzeń automatyki.
Układ jest stabilny jeżeli mianownik transmitancji zawiera tylko pierwiastki ujemne.
Bardziej precyzyjnie dla znających tzw. liczby zespolone. O nich zresztą będzie mowa w Rozdz. 19.
Układ jest stabilny jeżeli mianownik transmitancji zawiera tylko pierwiastki z ujemną częścią rzeczywistą.
Czyli słowo pierwiastek ujemny zastąpimy słowem ujemna część rzeczywista pierwiastka.
Rozdz. 16.2.5 Wnioski z dodatniego sprzężenia zwrotnego
1- Raczej staramy się go unikać
2- Przeważnie, ale nie zawsze, dodatnie sprzężenie zwrotne jest przyczyną niestabilności.
3- Uwaga ogólna dotycząca dowolnych transmitancji.
Dodatni pierwiastek mianownika transmitancji G(s) to niestabilność!
Rozdz. 16.3 Jak działa ujemne sprzężenie zwrotne?
Rozdz. 16.3.1 Wstęp
W automatyce stosowane jest ujemne sprzężenie zwrotne, którego najważniejszą cechą jest to, że sygnał wyjściowy y(t) „stara” się naśladować sygnał wejściowy x(t). Dlatego rakiety trafiają w cel, bo coś tam śledzą, piec stara się utrzymać temperaturę cieczy +75ºC gdy wartość zadana x(t) też wynosi +75ºC itd…
Rozdz. 16.3.2 Jak człon inercyjny w układzie otwartym dochodzi do stanu ustalonego?
Zanim zastanowimy się jak człon inercyjny z ujemnym sprzężeniem zwrotnym dochodzi do stanu ustalonego, odpowiedzmy na powyższe łatwiejsze pytanie.
Rys. 16-7
Człon inercyjny w układzie otwartym.
Obserwujemy sygnały:
– sygnał wejściowy-skok x(t)=1(t)
– sygnał wyjściowy y(t) członu inercyjnego K=5 i T=3sek
– cel K*x(t) (K=5)<– Co to jest cel? Za chwilę będziesz wiedział.
Stan ustalony y=K*x(t)=5 jest celem do którego dąży y(t). „Siłą napędową” powodującą wzrost y(t) jest różnica–pionowa zielona kreska U=K*x(t)-y(t). Na początku skoku x(t) w 1 sek sygnał y(t)=0. Dlatego „siła napędowa”- pionowa zielona kreska jest tu największa i y(t) startuje z maksymalną prędkością. Potem U stopniowo maleje (np. w 5 sek U≈1.3) i prędkość wzrostu też maleje. Po 25 sek siła napędowa U spadła do zera. Cel został osiągnięty y(t)=K*x(t).
Najważniejszy wniosek
Wyjście y(t) dąży do stanu równowagi
y(t)=K*x(t)
w którym znika „siła napędowa U”-pionowa zielona kreska
Wniosek jest tak oczywisty, że czytelnik zastanawia o co autorowi chodzi? A jest to po prostu wstęp do następnego rozdziału.
Rozdz. 16.3.3 Jak człon inercyjny z ujemnym sprzężeniem zwrotnym dochodzi do stanu ustalonego.
Rys. 16-8
Człon inercyjny z ujemnym sprzężeniem zwrotnym.
Na oscyloskop podane są sygnały:
– wyjściowy y(t)
– cel K*e(t) (K=5)
Tu y(t) też dąży do celu K*e(t) ,który jednak w odróżnieniu od układu otwartego jest zmienny w czasie. „Siłą napędowa”, która usiłuje zbliżyć do siebie cel K*e(t) i y(t) też jest różnica U=K*e(t)-y(t) w postaci pionowej zielonej kreski na prawym rysunku. Im bardziej różnica U – „siła napędowa” jest większa tym silniej linie cel K*e(t) i y(t) „lgną” do siebie.
Wyjście (t) dąży do stanu równowagi y(t)=K*e(t) w którym znika „siła napędowa U”-pionowa zielona kreska
A kiedy y(t) przestanie rosnąć? Albo inaczej-kiedy będzie stan ustalony. Wtedy, gdy cel zostanie osiągnięty, gdy siła napędowa (pionowa zielona kreska U) zniknie! Czyli gdy y(t)=K*e(t).
Tak jest nie tylko dla członu inercyjnego, ale dla każdego członu dynamicznego z ujemnym sprzężeniem zwrotnym, który w stanie ustalonym ma wzmocnienie K. Eksperyment potwierdza coś bardzo ważnego w automatyce.
Tak jak wytrącone z równowagi wahadło wróci do stanu ustalonego którym jest najniższe położenie
Tak układ stabilny z ujemnym sprzężeniem zwrotnym wróci do stanu y(t)=K*e(t)
Dotyczy to tylko układów stabilnych. A to nie zawsze się uda.
Pamiętasz Rys. 15-13e w Rozdz. 15? W nim jeszcze nie byłeś do końca przekonany, że w stanie ustalonym z ujemnym sprzężeniem zwrotnym jest y=K*e. Teraz już wiesz, że tak jest i tego dowodem są wykresy wykresy 5*e(t) i y(t) które spotkały się w miejscu y(t)=5*e(t)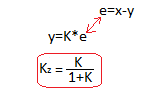
Rys. 16-9
Wzór dolny na wzmocnienie Kz układu zamkniętego wynika wprost z y(t)=K*e(t). Także y=0.83 na Rys. 16-8 potwierdza nasze obliczenia.
Rozdz. 16.3.4 Jak człon inercyjny z dużym ujemnym sprzężeniem zwrotnym dochodzi do stanu ustalonego?
Dodamy jeszcze obserwację uchybu regulacji e(t)=x(t)-y(t)
Rys. 16-10
Nastawy oscyloskopu są takie, że widać cały „zmienny cel” 100*e(t) gdzie e(t)=x(t)-y(t). Rzuca się w oczy bardzo duże początkowe 100*e(t) w porównaniu do sygnałów x(t),y(t) i e(t). Taki jest główny wniosek tego doświadczenia. Później dowiesz się, że jest to układ regulacji typu P, w którym 100*e(t) to sygnał sterujący. Charakterystyczna jest tu „szpila” 100*e(t) na początku skoku.
Z jednej strony dobrze-„szpila” powoduje prawie natychmiastowe dojście do stanu ustalonego w porównaniu do układu otwartego. Za to powstaje problem techniczny. Gdyby był to piec pobierający w stanie ustalonym moc np. 10kW, to „szpila” chce już 100 razy więcej–>1MW! Wrócimy jeszcze do tematu. Przy tych nastawach oscyloskopu jest bardzo niedokładny widok tego co najważniejsze, czyli sygnałów y(t), x(t) i e(t). Z grubsza widać, że w stanie ustalonym jest prawie x(t)=y(t)=1 oraz e(t)=0. Zmieńmy więc nastawę oscyloskopu tak aby zobaczyć te sygnały.
Otrzymasz schemat dokładnie taki sam jak Rys. 16-11. Różnica tkwi tylko w tym czego nie widać – w nastawach oscyloskopu.
Rys. 16-11
Widzisz ten sam przebieg, tylko w zakresie y=0…1.2 a nie y=1…100 jak poprzednio. Co prawda szpila została obcięta, za to widać dokładnie pozostałe sygnały-x(t),y(t) i e(t). Dzięki silnemu sprzężeniu zwrotnemu (sygnał y(t) wraca wzmocniony 100-krotnie!) i y(t) prawie natychmiast dochodzi do stanu ustalonego y(t)=0.99. Jest to potwierdzenie wzoru na wzmocnienie Kz w stanie ustalonym z Rys. 16-9.
Rozdz. 16.3.5 Jak człon dwuinercyjny z ujemnym sprzężeniem zwrotnym dochodzi do stanu ustalonego?
Poprzedni człon-inercyjny dochodził do stanu ustalonego „od dołu”. Tzn. y(t) było cały czas mniejsze od 5*e(t). Wiadomo jednak, że układy regulacji często robią to z oscylacjami. Przykładem będzie właśnie człon dwuinercyjny ze sprzężeniem zwrotnym.
Rys. 16-12
Sygnał y(t) już w 6 sek doszedł do wartości w której y(t)=K*e(t). Niby jest to stan równowagi, ale y(t) rośnie dalej. Dlaczego tak jest?
– Po pierwsze nie jest to stan równowagi, bo y(t) się „rusza”. Co prawda y(t)=K*e(t) ale pochodne y(t) (np. prędkość y(t)) nie są zerowe!
– Po drugie To jest człon dwuinercyjny. Sygnał y(t) może rosnąć przez chwilę gdy sygnał wejściowy jest zerowy a nawet ujemny!
Wróć na chwilę do Rys. 20-12 czyli do inercyjnego. Tu cały czas K*e(t) jest większe od y(t). Albo innymi słowy y(t) dochodzi do celu K*e(t) od dołu. Dlatego, że „siła napędowa” U – pionowa zielona kreska była cały czas dodatnia.
A jak jest na Rys. 16-12?
Tu do 6 sek „siła napędowa” w postaci zielonej kreski jest dodatnia. Dalej nagromadzona energia członu dwuinercyjnego każe przekroczyć pozorny stan równowagi y(t)=K*e(t) i „siła napędowa” staje się ujemna. Czyli z „siły napędowej” staje się „siłą hamującą”. Efekt hamowania jest wyraźnie widoczny. Czerwone y(t) zmniejsza prędkość wzrostu, aż staje się ujemna. Teraz y(t) ponownie „zawraca” i tak po kilku oscylacjach osiąga prawdziwy (a nie „na niby” jak w 6 sek) stan równowagi, w którym y(t)=5*e(t)=0.83 .
Rozdz. 16.3.6 Człony statyczne i astatyczne
Przypomnę, że dla G(s) wzmocnienie w stanie ustalonym K możemy obliczyć 2 metodami:
1- Z przebiegów czasowych–>K=y(t)/x(t) w stanie ustalonym np. na Rys.16-12
2- Bezpośrednio z transmitancji obliczając K=G(s=0) jak poniżej
Rys. 16-13
Rys. 16-13a człon inercyjny – bez komentarza
Rys. 16-13b człon dwuinercyjny – bez komentarza
Rys. 16-13c człon różniczkujący rzeczywisty. W stanie ustalonym y(t)=0!
Powyższe wzmocnienia K w stanie ustalonym są chyba oczywiste. Może mały znak zapytania to Rys. 16-13c ale ujdzie jakoś.
Były to tzw. człony statyczne które na skok jednostkowy x(t) dają konkretną skończoną odpowiedź w stanie ustalonym.
Problem powstaje natomiast z członem całkującym idealnym na Rys. 16-13d w którym musimy złamać świętą zasadę „Pamiętaj cholero nie dziel nigdy przez zero”. Jeżeli jednak złamiemy ją tyci tyci, czyli podzielimy przez liczbę nieskończenie bliską 0 to otrzymamy K=nieskończoność. Ten człon i inne (np. Rys. 16-13e) które mają chociaż jeden pierwiastek zerowy w mianowniku, są członami astatycznymi.
Rys. 16-13d człon całkujący
Rys. 16-13e człon całkujący rzeczywisty, czyli z inercją
A do jakiego stanu ustalonego dążą człony astatyczne?
Rozdz. 16.3.7 Dochodzenie do stanu ustalonego członu astatycznego w układzie otwartym
Tytuł jest prowokacyjny. Za chwilę dowiesz się dlaczego.
Aby pokazać typowe cechy członu całkującego jako astatycznego, na wejście będzie podany sygnał x(t) który:
– Na początku jest dodatnim skokiem jednostkowym
– potem ma wartość zerową
– potem jest ujemnym skokiem jednostkowym
– kończy jako 0
Rys. 16-14
Może to być np. idealny silnik prądu stałego z licznikiem na jego osi. Idealny, bo nie uwzględnia bezwładności mechanicznej (głównie masa wirnika) i elektrycznej (indukcyjność uzwojeń). Sygnałem wyjściowym y(t) jest liczba obrotów. Może być niecałkowita np. +5.23.
Jeżeli masz problem z tym, że y(t) jest liczbą a nie napięciem, to dodaj do licznika przetwornik cyfrowo/analogowy. Sygnałem wejściowym jest natomiast napięcie zasilające x(t) które zmienia się w 4 etapach:
etap 0…3 sek napięcie x(t)=0V–> silnik stoi czyli y(t)=0
etap 3…10 sek napięcie x(t)=+1V silnik ze stałą prędkością kręci w prawo–> y(t) rośnie liniowo.
etap 10…30 sek napięcie x(t)=0V–> silnik stoi czyli na poziomie y(t)=7–>licznik pokazuje 7 obrotów w prawo, które wykonał silnik.
etap 30…40 sek napięcie x(t)=-1V silnik ze stałą prędkością kręci w lewo–> y(t) maleje liniowo.
etap 40…60 sek napięcie x(t)=0V –> silnik stoi czyli y(t)=-3–>licznik pokazuje 3 obroty w lewo (licząc od stanu początkowego y(t)=0), które wykonał silnik.
Wnioski
1- Sygnał wyjściowy y(t) rośnie ze stałą prędkością gdy sygnał wejściowy x(t) jest stały dodatni
2- Sygnał wyjściowy y(t) maleje ze stałą prędkością gdy sygnał wejściowy x(t) jest stały ujemny
3- Prędkość narastania lub opadania jest proporcjonalna do sygnału wejściowego x(t)
4- Sygnał wyjściowy y(t) zatrzyma się gdy sygnał wejściowy x(t)=0.
Teraz już wiesz dlaczego tytuł był prowokacyjny. Przy skoku jednostkowym y(t) nigdy nie osiągnie stanu ustalonego , tj. takiego w którym jest nieruchomy. Ściślej, w stanie ustalonym y(t) jest nieskończonością, czyli wzmocnienie K jest od strony formalnej nieskończonością.
Rozdz. 16.3.8 Jak człon całkujący z ujemnym sprzężeniem zwrotnym dochodzi do stanu ustalonego?
Człon całkujący jest przykładem członu astatycznego.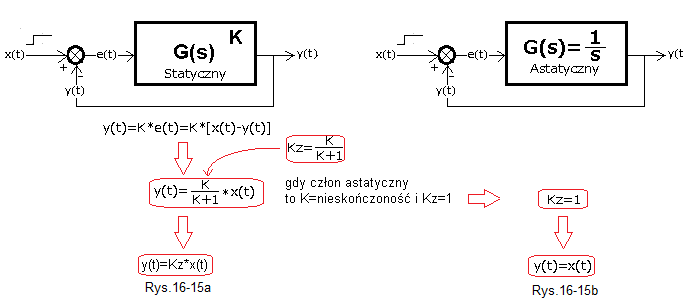
Rys. 16-15
Rys.16-15a to do znudzenia już powtarzany wzór dla wzmocnienia ustalonego Kz układu zamkniętego dla członów statycznych.
Rys. 16-15b to analogiczne wzory dla członów astatycznych. Porażają prostotą i wynika to z tego, że dla astatycznych wzmocnienie K=nieskończoność.
W stanie ustalonym y(t)=x(t). Czyli wyjście y(t) idealnie odtwarza wejście x(t). Czyli zapewnia zerowy uchyb ustalony e(t). Jest to cel każdego automatyka. Tak mówi teoria. A co intuicja?
Rys. 16-16
Widzisz jak człon całkujący dochodzi do stanu ustalonego y(t)=x(t)=1. Porównaj z Rys. 20-12 z członem inercyjnym który należy do statycznych. W nim „siłą napędową” która dąży do stanu równowagi określonej wzorem z Rys. 20-21a było 5*e(t)-y(t). Tu natomiast siłą napędową jest uchyb e(t). Prostota jest piękna!
Gdy x(t)>y(t) (inaczej e(t)>0) to y(t) rośnie jak w każdym porządnym członie całkującym. Dodam jeszcze, że rośnie z coraz mniejszą prędkością bo e(t) cały czas maleje. W stanie ustalonym ta prędkość jest oczywiście zerowa. Wtedy y(t)=x(t)=1 i e(t)=0
Sprawdźmy jeszcze jak trochę bardziej skomplikowany człon astatyczny tj całkujący z inercją dochodzi do stanu równowagi.
Rozdz. 16.3.9 Jak człon całkujący z inercją i z ujemnym sprzężeniem zwrotnym dochodzi do stanu ustalonego?
Tak jak poprzednim punkcie badaliśmy idealny człon całkujący w sprzężeniu zwrotnym, tak teraz weźmiemy na warsztat rzeczywisty człon całkujący. Będzie nim dalej silnik prądu stałego, ale uwzględniający już bezwładność elektromechaniczną. Tym razem ominiemy badanie tego silnika w układzie otwartym. Da ono podobne wyniki jak na Rys. 16-14 tylko przebiegi będą bardziej wygładzone, tak jak na Rys.8-5 rozdz. 8.
Rys. 16-17
Widać jak dodatnie e(t) (tak jak pionowa zielona kreska) napędza y(t) w kierunku równowagi, a ujemne e(t) hamuje. Zauważ że chociaż np. w 6 sek. jest stan x(t)=y(t)=1 ale tylko chwilowy. Silnik ma w sobie pewną energię, która „każe” mu dalej kręcić powyżej stanu ustalonego x(t)=y(t)=1. Wtedy ujemne e(t) każe mu hamować. W końcu po kilu oscylacjach zostanie wykonany jeden obrót. Wystąpi wtedy stan ustalony x(t)=y(t)=1. Czyli e(t)=0.
Rozdz. 16.7 Wnioski
Rozdz. 16.7.1 Transmitancje układu zamkniętego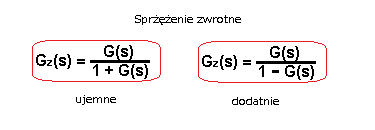
Rys. 16-18
Wzory dotyczą wszystkich członów G(s) – statycznych i astatycznych
Rozdz. 16.7.2 Układy statyczne z ujemnym sprzężeniem zwrotnym
Rys. 16-19
W automatyce zależy nam na tym aby y(t) „słuchało” się wartości zadanej x(t). Jest to spełnione („prawie”) gdy wzmocnienie w układzie otwartym K jest duże. Wtedy jest „prawie” Kz=1 Ke=0 .
Rozdz. 16.7.3 Układy astatyczne z ujemnym sprzężeniem zwrotnym
Rys. 16-20
Wzmocnienie Kz jest równe 1 a uchybowe Ke równe 0. Z tego wynika, że układy astatyczne zapewniają zerowy uchyb ustalony e(t).
Tzn. że w stanie ustalonym y(t)=x(t). Są łatwiejsze do zrozumienia niż statyczne. Później dowiesz się, że zerowy uchyb ustalony e(t) zapewnia składowa całkująca I regulatora PID.
Rozdz. 16.7.4 Czego ważnego nie było w tym rozdziale
1- Niestabilność w ujemnym sprzężeniu zwrotnym –> Tematem zajmiemy się w następnym rozdziale.
2- W układzie statycznym np. inercyjnym otwartym gdy K=1, stan ustalony zapewnia y(t)=x(t). To po co komplikować życie jakimiś sprzężeniami zwrotnymi? Odpowiedź jest prosta
Ujemne sprzężenie zwrotne zapewnia:
– odporność na zakłócenia zewnętrzne
– poprawia dynamikę czyli szybkość reakcji.