Podstawy automatyki
Rozdz. 14 Rachunek operatorowy
Rozdz. 14.1 Wstęp
Każdej funkcji czasu f(t) przyporządkowana jest jej transformata Laplace’a F(s)
będąca najczęściej ilorazem 2 wielomianów zmiennej zespolonej s.*
f(t) ==>F(s) (Rys. 14-1a)
I odwrotnie Każdej transformacie Laplace’a F(s) przyporządkowana jest jej funkcja czasu f(t)
F(s) ==>f(t) (Rys. 14-1b)
Ostatecznie „działa to w obie strony”
f(t)<==>F(s) (Rys. 14-1c)
*Jeżeli nie znasz liczb zespolonych, to się nie przejmuj. Traktuj je jak zwykłe zmienne s.
Poniżej przykład gdzie f(t) jest funkcją czasu a F(s) ułamkiem. W nim licznik L(s) jest wielomianem stopnia 2 a mianownik stopnia 3:
Rys. 14-1
Relacje między f(t) a F(s)
Jeszcze bardziej konkretny przykład
Rys. 14-2
Przykład dla funkcji f(t)=cos(t)
Uwaga 1
Tak naprawdę f(t)=cos(t) tylko dla t>=0. Dla t<0 f(t) =0!!!! Zasada dotyczy wszystkich podanych dalej funkcji f(t). Wiąże się to z tym, że w automatyce wszystko zaczyna się w konkretnym czasie, najczęściej dla t=0. Np. funkcja skok jednostkowy x(t)=1 dla t ujemnego jest zerowa
Uwaga 2:
Wyrażenie f(t)=F(s) byłoby absolutnie bez sensu!
Rozdz. 14.2 Związek między F(s) a f(t)
Funkcję czasu f(t) i jej transformatę F(s) wiąże równanie
Rys. 14-3
Wzór na F(s) dla funkcji f(t)
Dla prostych funkcji f(t) da się to jeszcze policzyć. Dla bardziej skomplikowanych też, ale tylko jednorazowo dla zaliczenia kolokwium. Nawet zastanawiałem się, czy podawać ten wzór. Zwłaszcza, że oprócz pojęcia całki utrudnieniem jest liczba s. Jest tzw. liczbą zespoloną, w dodatku aby było weselej w funkcji wykładniczej .
Jeżeli to Ciebie peszy, to możesz sobie odpuścić. Wtedy Transformatę Laplace’a traktuj jako zwykłe przyporządkowanie f(t)<=>F(s). Tak jakby była gdzieś bardzo mądra książka, a niej pary f(t)<=>F(s). Nawet teoretyk automatyki czasami korzysta z takiej książki. Jej kawałek, czyli tylko jedna para dla f(t)=cos(t) to Rys. 14-2c. Więcej par to Rys. 14-5. A co do liczby zespolonej s, to traktuj ją, jak poczciwą liczbę rzeczywistą. Miej tylko świadomość, że ją nie jest.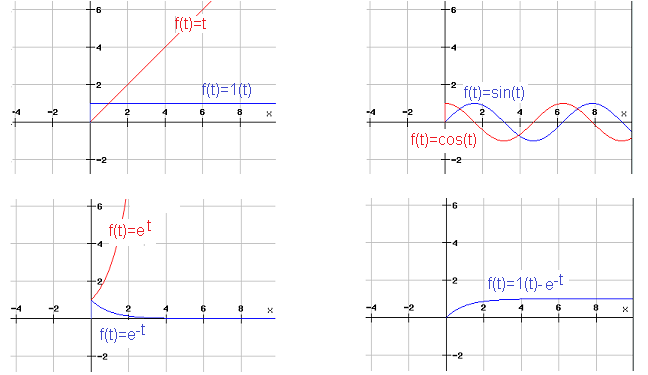
Rys. 14-4
Funkcje f(t) dla których na Rys. 14-5 przyporządkowane są odpowiednie transformaty F(s).
Wykresy są po to by podkreślić, że wszystkie funkcje f(t) mają wartość zerową dla t<0. Na ogół tak jest w automatyce, że coś się zaczyna w chwili t=0, np. skok jednostkowy f(t)=1(t).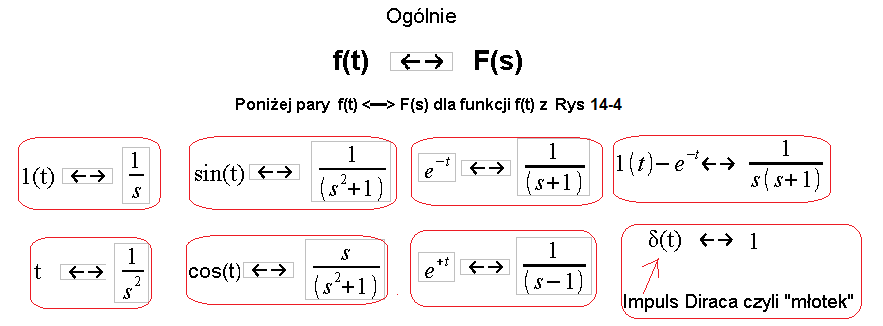
Rys. 14-5
Na rysunku jest także para δ(t)<==>1 czyli impuls diraca i jego transformata F(s)=1.
Liczba e=2,7182… w 3 wzorach należy do „najsławniejszych” w matematyce obok 0, 1 , PI…
Rozdz. 14.3 Jak różniczkowanie funkcji f(t) wpływa na jej transformatę F(s)?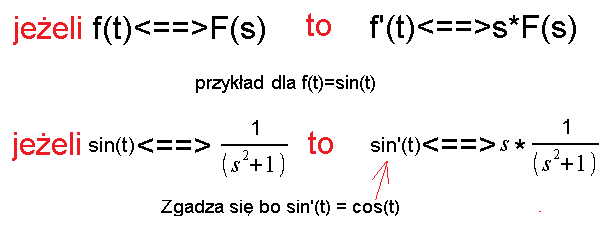
Rys. 14-6
Jest to najważniejsze twierdzenie rachunku operatorowego. Bez niego nie byłoby rachunku operatorowego!
Uwaga
Tak naprawdę wzór na transformatę pochodnej trochę się różni, ale w większości przypadków można go stosować. I tak niech zostanie.
Wzór można łatwo uogólnić na dalsze pochodne
Rys. 14-7
Obliczanie pochodnej funkcji wymaga pewnego wysiłku. Za to obliczanie transformaty n-tej pochodnej to bułka z masłem. Wystarczy pomnożyć F(s) przez n-tą potęgę s. Ta zasada bardzo ułatwia rozwiązywanie liniowych równań różniczkowych. Przekonasz się o tym w następnym rozdziale.