Podstawy automatyki
Rozdz. 11 Różniczkowanie
Rozdz. 11.1 Wstęp
Jeżeli znasz temat, to rozdział możesz pominąć. Ale jeżeli nie lub „nie bardzo”, to serdecznie polecam. Do tej pory najczęściej używanym pojęciem była Transmitancja G(s), jako „coś”, co wiąże wyjście y(t) zwejściem x(t). Dla układów pozbawionych dynamiki (wzmacniacz idealny, dźwignia, przekładnia zębata….) jest to po prostu wzmocnienie K czyli człon proporcjonalny o transmitancji K.
Przy pierwszym podejściu do danego zjawiska, procesu technologicznego prawie wszystko jest członem proporcjonalnym. Masz piecyk elektryczny w mieszkaniu, gdzie wejściem x(t) jest pokrętło mocy a wyjściem y(t) temperatura. Z doświadczenia wiesz, że jeżeli na zewnątrz panuje stała temperatura np -10ºC, okna sąpozamykane…, to x(t)=1 kW spowoduje temperaturę w pokoju =+20ºC, x(t)=1.1kW–>=+21ºC, x(t)=1.2kW–>=+22ºC…itd. Traktujesz cały układ z piecem i pokojem jako człon proporcjonalny.
Po pewnym czasie będzie miało jednak znaczenie to, że przyrost temperatury np. o ΔT+5ºC będzie trwał ok. 20 minut. Jest już to dla Ciebie obiekt dynamiczny. Dość prosto opisany, ale zawsze tam. Potem przybliżysz ten układ członem inercyjnym. Następnie już dokładniej jako inercja z opóźnieniem czyli transmitancja zastępcza. Być może uda się zidentyfikować obiekt jako czteroinercyjny, które ma 4 stałe czasowe T1, T2, T3, T4 i wzmocnienie K.
Do tej pory traktowałeś transmitancję G(s) jako „coś”, co daje odpowiedni sygnał wyjściowy y(t) na wejściowe x(t)-najczęściej skok jednostkowy. Wiesz też, co może spowodować mała samotna literka s w mianowniku G2(s) w porównaniu do G1(s), już nie mówiąc o literce s w liczniku G3(s).
Rys. 11-1
Jak nie wiesz, to szybko wracaj do odpowiednich rozdziałów.
Po przeczytaniu rozdziałów 15…18 z „Trochę matematyki” ,będziesz miał wstępne pojęcie na temat:
– Pochodnej
– Całki Oznaczonej
– Równań różniczkowych w tym równań różniczkowych liniowych na których oparta jest teoria sterowania
– Rachunku Operatorowego jako narzędzia do rozwiązywania równań różniczkowych liniowych
– Transmitancji G(s) jako odpowiednik równania różniczkowego opisującego obiekt dynamiczny.
Rozdz. 11.2 Pochodna funkcji
Do znudzenia powtarzałem, zwłaszcza w rozdziale 5, że pochodna funkcji jest „prędkością funkcji”!!! Jak tego nie czujesz, to powtórz ten rozdział. Dla członu różniczkującego G(s)=s*Td, wyjście y(t) jest proporcjonalne do pochodnej wejścia x(t), czyli do x'(t). A dla Td=1 sek wyjście y(t) jest po prostu pochodną wejścia x(t).
W analizie matematycznej są wzory które każdej funkcji przyporządkowują jej pochodną. I tak człon różniczkujący na Rys. 5-7 w rozdziale 5 przetwarza sygnał x(t) o przebiegu kwadratowym na sygnał y(t)=2*t. Jak masz ochotę to wróć do tego rozdziału i powtórz doświadczenie.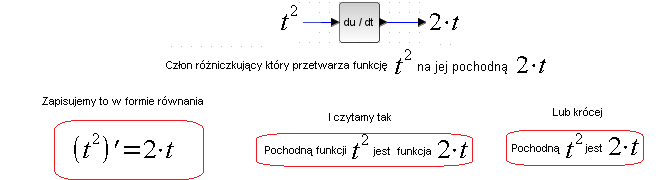
Rys. 11-2
Każdy student 1 roku politechniki zaczyna analizę matematyczną od tych wzorów.
Rozdz. 11.3. Druga pochodna, czyli „pochodna z pochodnej”
Pochodna jest funkcją. Czyli można z tej funkcji ponownie obliczyć pochodną czyli drugą pochodną.
Rys. 11-3
Na konkretnym przykładzie f(t) jako funkcji kwadratowej obliczymy drugą pochodną tej funkcji.
Rys. 11-4
Sprawdźmy to poprzez dwukrotne różniczkowanie.
Rys. 11-5
Za pierwszym członem różniczkującym mamy pierwszą pochodną x'(t), a za drugim – pochodną z pierwszej pochodnej, czyli drugą pochodną x”(t). Sprawdźmy czy teoria zgadza się z praktyką.
Zgadza się! Jak nie wierzysz, to sprawdź podstawiając konkretne wartości.
Gdyby był jeszcze trzeci człon różniczkujący, to otrzymalibyśmy trzecią pochodną x”'(t) jako pochodną z drugiej pochodnej x”(t):
x”'(t)=[(x”(t)]’ = (2)’ = 0 . Pochodna funkcji stałej (2)’=0 jest zawsze zerowa, gdyż „prędkość”, albo „nachylenie” funkcji stałej jest zawsze zerowe. Czyli trzecią pochodną jest oś t (czasu) wykresu.