Podstawy automatyki
Rozdz. 6 Człon dwuinercyjny
Rozdz. 6.1 Wstęp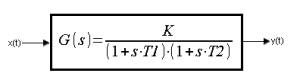
Rys. 6-1
Transmitancja Członu dwuinercyjnego o wzmocnieniu K i stałych czasowych T1 i T2.
Wcześniej przykładem członu inercyjnego był piec. Na początku temperatura rośnie najszybciej, potem prędkość temperatury stopniowo maleje (ale sama temperatura dalej rośnie!). W końcu przestanie rosnąć i osiągnie stan ustalony-maksymalny, np. +150 °C. Na początku temperatura rośnie najszybciej? Czyżby? Jak się dobrze przyjrzysz, to na początku nic się nie dzieje. Czyli początkowa prędkość wzrostu temperatury jest zerowa. Dopiero potem temperatura stopniowo rozpędza się i w pewnej chwili prędkość osiąga maksimum. (Prędkość czyli pochodna temperatury, a nie sama temperatura!). Od tego momentu prędkość maleje, aż stanie się zerowa i temperatura osiągnie wartość ustaloną-maksymalną.
Czyli człon inercyjny jako model pieca, to tylko jego pierwsze przybliżenie. Człon dwuinercyjny jest już dokładniejszy. Ale nie przesadnie dokładny, bo jak się za chwilę przekonasz, początkowa prędkość choć już nie jest maksymalna, to nie jest też zerowa.
Rozdz. 6.2 Suwak jako wejście i bargraf jako wyjście
Rys. 6-2
Człon dwuinercyjny jako szeregowe połączenie dwóch inercyjnych.
yp(t)-sygnał pośredni z pierwszego członu inercyjnego.
„Machanie” suwakiem i obserwowanie bargrafu to tylko wstępne zapoznanie się z obiektem. Może uda się zauważyć stopniowe „rozpędzanie” się temperatury. Ale na pewno zauważysz cechę dwuinercyjnego,której nie miał inercyjny.
Podano +maksymalny sygnał wejściowy z suwaka, i gdy y(t) jest najbardziej rozpędzone, podano -minimalny. Na pewno zauważysz, że sygnał wyjściowy dalej rośnie, chociaż na wejściu jest już nie tylko zero ale nawet minus! Czyli hamowanie do kwadratu.
Tak też jest w prawdziwym piecu. Temperatura rośnie dalej, nawet gdy przerwę dopływ mocy.
Obserwując mierniki cyfrowe zauważysz, że sygnał pośredni yp(t) „wyprzedza” sygnał za wyjściowy y(t).
Więcej ciekawych rzeczy, między innymi punkt przegięcia, zauważysz badając przebiegi czasowe na oscyloskopie.
Rozdz. 6.3 Sygnał wejściowy x(t) jako skok jednostkowy
Rys. 6-3
Sygnał “przejściowy” yp(t) za pierwszą inercją wyraźnie wyprzedza y(t) drugą-czyli wyjście Członu Dwuinercyjnego. Widać także efekt rozpędzania się. W okolicach 6 sekundy prędkość wzrostu y(t) (czyli pochodna y'(t) ) jest największa. Tu jest tzw. punkt przegięcia funkcji y(t) Po 29 sekundach mamy stan ustalony y(t)=1. Wtedy prędkość y(t), czyli pochodna y'(t) jest zerowa.
Rozdz. 6.4 Sygnał wejściowy x(t) jako pojedynczy impuls prostokątny
Rys. 6-4
W czasie 8…8.7 sek sygnał wyjściowy y(t) rośnie, chociaż wejściowy x(t) spadł do zera!
W tym czasie yp(t)>y(t) i to jest właśnie przyczyną tego zjawiska.
Rozdz. 6.5 Człony Wieloinercyjne
Spójrz na Rys. 6-1. Mianownik ma 2 czynniki i jest to człon dwuinercyjny. Gdyby miał 3 czynniki, to byłby trójinercyjny. A gdyby było wiele czynników, to wieloinercyjny. Im większe jest to „wiele”, tym mniejsza jest prędkość początkowa sygnału wyjściowego y(t). Dużo procesów w przemyśle, zwłaszcza chemicznym, ma charakter członów wieloinercyjnych. W rozdz. 9 dowiesz się, że przybliża się je tzw. transmitancją zastępczą.