Podstawy automatyki
Rozdz. 20 Kryterium stabilności Hurwitza
Rozdz. 20.1 Wstęp
Poznany wcześniej Nyquist był przykładem kryterium stabilności typu częstotliwościowego. Nie trzeba chyba tłumaczyć dlaczego. Drugie podejście to analiza transmitancji G(s). Problem wiąże się się z badaniem równania M(s)=0, gdzie wielomian M(s) jest mianownikiem transmitancji G(s).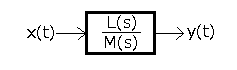
Rys. 20-1
G(s) jako ułamek.
Wniosek
Automatyk powinien dobrze znać się na równaniach typu M(s)=0. Gdy M(s) jest np. wielomianem 5 stopnia to równaniem M(s)=0 może być np.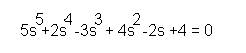
Rys. 20-2
Przykład równania 5 stopnia
Rozdz. 20.2 Równania kwadratowe i wyższych stopni oraz liczby zespolone
Dobrze znamy równania 2 stopnia, czyli kwadratowe, że już nie wspomnę o równaniach 1 stopnia. Są też wzory wzory na pierwiastki równań 3 stopnia , może nawet 4. Powyżej, któregoś tam nie ma już takich wzorów. Albo są, tylko czekają na swojego Kolumba. Przy okazji, może ktoś zna dokładny stopień równania, dla którego nie ma już wzoru? Będę wdzięczny za odpowiedź. W każdym bądź razie równania wyższych stopni można rozwiązać tylko metodą numeryczną-czyli przybliżoną. Przypomnę dobrze znany wzór na równanie kwadratowe.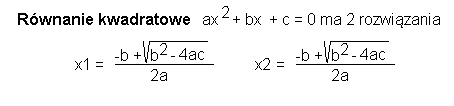
Fig. 20-3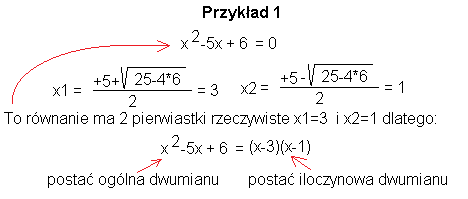
Fig. 20-4
Tu delta jest nieujemna i dlatego równanie ma 2 pierwiastki rzeczywiste x1=3 i x2=2. Znając pierwiastki równania kwadratowego, możemy napisać też postać iloczynową dwumianu. Jest ona wygodna, bo widać w niej pierwiastki. Rozwiążmy jeszcze jedno równanie.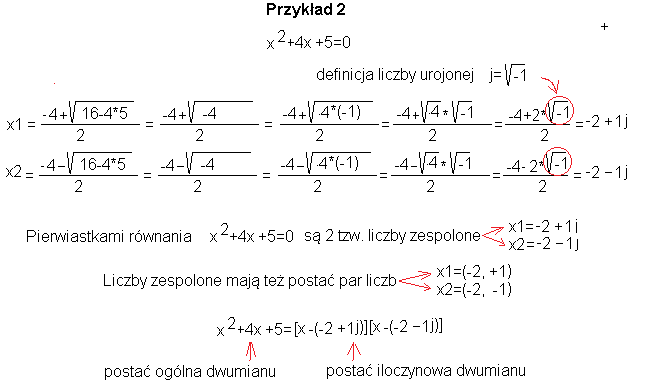
Rys. 20-5
Kurza twarz. Delta ujemna. W szkole średniej powiedzielibyśmy „równanie nie ma rozwiązań”. Jeżeli jednak założymy, że istnieje taka dziwna liczba j, że jej kwadrat to -1, ( albo równa jest pierwiastkowi z -1 czyli√-1), to jednak istnieją 2 pierwiastki:x1=-2+1*j i x2=-2-1*j. W ten sposób weszliśmy w dziedzinę liczb zespolonych.
Skąd taka nazwa? Stąd, że tworzą zespół dwóch liczb. Pierwsza to część rzeczywista, druga to część urojona. Już od pierwszej klasy szkoły podstawowej posługujesz się liczbami zespolonymi. Nie wiedziałeś tylko, że korzystasz wyłącznie z części rzeczywistej tej liczby. Część urojona była zawsze zerowa. Dlatego kupując 3 kg lub (3,0) kg ziemniaków zawsze dostaniesz to samo. Za drugim razem traktowałeś (3,0) kg lub inaczej (3+j*0)kg, jako liczbę zespoloną.
Uwaga na marginesie.
Dla matematyków liczba urojona to i. Liczby zespolone pokochali od pierwszego wejrzenia elektrycy, zwłaszcza gdy pojawił się prąd zmienny czyli sinusoidy poprzesuwane w fazie. Z poprzedniego rozdziału wiesz, że te sinusoidy pięknie przedstawia się jako wektory. Wtedy np. sumę 2 sinusoid łatwo przedstawia się jako sumę wektorową. Mało tego różniczkowanie lub całkowanie sinusoid to po prostu przesuwanie ich o kąt +90° lub o -90°. Dla wektorów to banał. A wektor to prawie liczba zespolona!
Powracając do matematyków i elektryków to ci ostatni używają symbolu j zamiast i. Uzasadnienie jest proste. Symbol i za bardzo gryzłby się z symbolem prądu.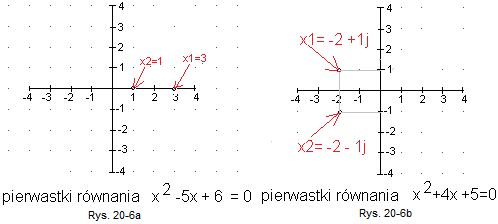
Rys. 20-6
Geometryczna interpretacja liczb zespolonych jako pierwiastki równania kwadratowego
Fig. 20-6a
Pierwiastki równania kwadratowego jako liczby rzeczywiste x1=3 i x2=1(są także liczbami zespolonymi!)
Fig. 20-6b
Pierwiastki równania kwadratowego jako liczby zespolone x1=-2+1j i x2=-2-1j
Iloczynowa postać wielomianu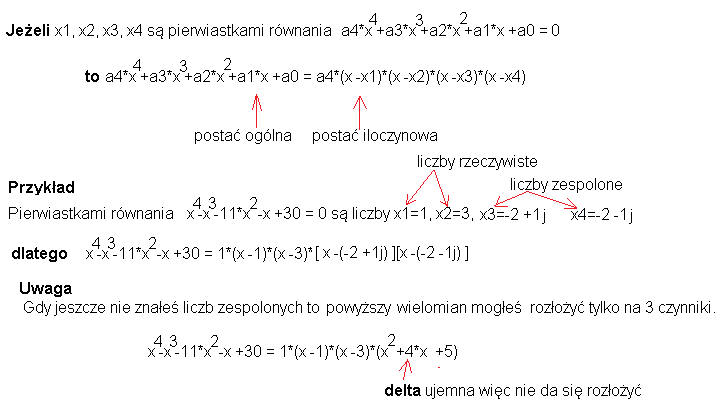
Rys. 20-7
Jak rozkładać na iloczyn wielomian 4 stopnia?
Wystarczy tylko znać jego 4 pierwiastki-> x1, x2, x3 i x4. Mogą to być liczby rzeczywiste lub zespolone. Metody dla wyższych stopni 5…n są analogiczne. Nie ma ogólnych wzorów na pierwiastki, gdy M(s) jest wysokiego stopnia. Stosuje się wtedy mające ograniczoną dokładność metody numeryczne.
Rozdz. 20.3 Pierwiastki mianownika M(s) transmitancji G(s) tylko rzeczywiste – Jaka stabilność?
Okaże się, że o stabilności decyduje mianownik transmitancji G(s).
Rozdz. 20.3.1 Stabilny-Wszystkie pierwiastki mianownika ujemne
Fig. 20-8
Badamy transmitancję G(s), której mianownik jest w postaci wielomianu 2 stopnia M(s)=s²+4s+3. Na górze jest ta sama G(s), ale mianownik jest w postaci iloczynu. Możesz sprawdzić. A dlaczego w postaci iloczynu? Bo widać w nim pierwiastki s1=-3 i s2=-1 równania kwadratowego M(s)=0. Obydwa są ujemne. No i co z tego? Impuls Diraca wyprowadził układ ze stanu równowagi, ale po ok. 3 sek wrócił z powrotem do równowagi. W dodatku bez żadnych przeregulowań. Tzn. przebieg y(t) cały czas był dodatni.
Rozdz. 20.3.2 Niestabilny-pojawia się dodatni pierwiastek mianownika
Tu jeden pierwiastek dodatni s2=+0.075
Rys. 20-9
Tak jak się spodziewaliśmy, układ jest niestabilny. Wyjście y(t) dąży do + ∞. Spowodował to właśnie dodatni pierwiastek mianownika s2=+0.075.
Zbadaliśmy 2 transmitancje G(s) (Rys. 20-8 i 20-9), których mianownik M(s) miał pierwiastki rzeczywiste. Albo inaczej, delta mianownika nie była ujemna. Nawet tylko jeden dodatni pierwiastek to niestabilność! Można to uogólnić na M(s) dowolnego n-tego stopnia.
Wniosek:
G(s) jest stabilny, gdy wszystkie pierwiastki mianownika M(s)=0 są ujemne.
A gdy delta jest ujemna, czyli gdy pierwiastki są liczbami zespolonymi?
Rozdz. 20.4 Pierwiastki mianownika M(s) transmitancji G(s) zespolone – Jaka stabilność?
Rozdz. 20.4.1 Stabilny-Wszystkie pierwiastki mianownika mają ujemną część rzeczywistą
Rys. 20-10
Delta ujemna–> pojawią się pierwiastki zespolone równania M(s)=0. Obliczysz je korzystając z przykładu 2 na Rys. 20-5. Części rzeczywiste tych pierwiastków to -1, czyli są ujemne. Podejrzewam, że układ jest stabilny. Po kilku sekundach od impulsu diraca , układ wrócił do stanu równowagi. Jednak w odróżnieniu od Rys. 20-8 powrót ten nastąpił z oscylacjami. Bardziej uczenie – zadyndało. Teraz możemy zmodyfikować poznane wcześniej twierdzenie o stabilności.
Transmitancja G(s) jest stabilna, gdy wszystkie części rzeczywiste pierwiastków równania M(s)=0 są ujemne
Wyrażenie „części rzeczywiste” dotyczy pierwiastków, które są zespolone i mają niezerową część urojoną. Dlatego powyższe twierdzenie jest uogólnieniem poprzedniego twierdzenia. Wielomiany M(s) są oczywiście dowolnego stopnia.
Można jeszcze dodać czym różni się stabilność z Rys. 20-8 od stabilności z Rys. 23-10:
– Rys. 20-8 – Powrót do stanu równowagi bez oscylacji. Wtedy pierwiastki są liczbami rzeczywistymi albo inaczej – pierwiastki traktowane jako liczby zespolone mają zerową część urojoną.
– Rys. 23-10 – Powrót z oscylacjami. Wtedy pierwiastki są „stuprocentowymi” liczbami zespolonymi.
Rozdz. 20.4.2 Stabilny-Pierwiastki mianownika mają dodatnią część rzeczywistą
A gdy części rzeczywiste pierwiastków zespolonych są dodatnie? Chyba się domyślasz.
Rys. 20-11
Części rzeczywiste tych pierwiastków z M(s)=0 to +0.05. Są dodatnie.
Tak jak przypuszczaliśmy układ jest niestabilny. Amplituda drgań narasta do nieskończoności. Powodem była para pierwiastków zespolonych z dodatnimi częściami rzeczywistymi.
Rozdz. 23.5 Kryterium Hurwitza – Nie musisz znać wartości pierwiastków M(s) aby ocenić stabilność!
Transmitancja G(s) układu otwartego (bez ujemnego sprzężenia zwrotnego) jest często w postaci iloczynowej tzn. znamy jej pierwiastki. Jest też stabilna. Objęcie transmitancji G(s) pętlą ujemnego sprzężenia spowoduje zmianę jej wartości na Gz(s).
Jak widać na poniższym rysunku, mianownik M(s) nie jest już w postaci iloczynowej. Dla M(s) drugiego stopnia nie stanowi to problemu, ale dla wyższych stopni nie jest już tak miło. Wzory, jeżeli w ogóle istnieją nie są już tak proste, jak dla równania kwadratowego.
Rys. 20-12
-a W układzie otwartym mianownik M(s)=(s+1)*(s+2) jest w postaci iloczynowej. Widoczne są pierwiastki s1=-1, s2=-2. Łatwo ocenić, że układ otwarty jest stabilny
-b transmitancja układu zamkniętego Gz(s) – wynik pośredni
-c transmitancja układu zamkniętego Gz(s) – wynik ostateczny. Tu M(s) jest w postaci wielomianu. Nie „widać” pierwiastków.
Nie muszę dodawać, że chcąc zbadać stabilność układu zamkniętego musisz zbadać mianownik układu zamkniętego c. Czyli nie jest tak jak w Nyquiście, w którym badasz układ otwarty. Jeszcze raz przypomnę twierdzenie o stabilności.
Transmitancja G(s) jest stabilna, gdy wszystkie części rzeczywiste pierwiastków równania M(s)=0 są ujemne.
Inaczej
Pierwiastki leżą w lewej półpłaszczyźnie liczb zespolonych, tak jak np. na Rys. 20-6b. Czyli nie musisz znać dokładnych wartości pierwiastków. Wystarczy tylko wiedza, czy ich części rzeczywiste są ujemne. Tym właśnie zajmuje się twierdzenie Hurwitza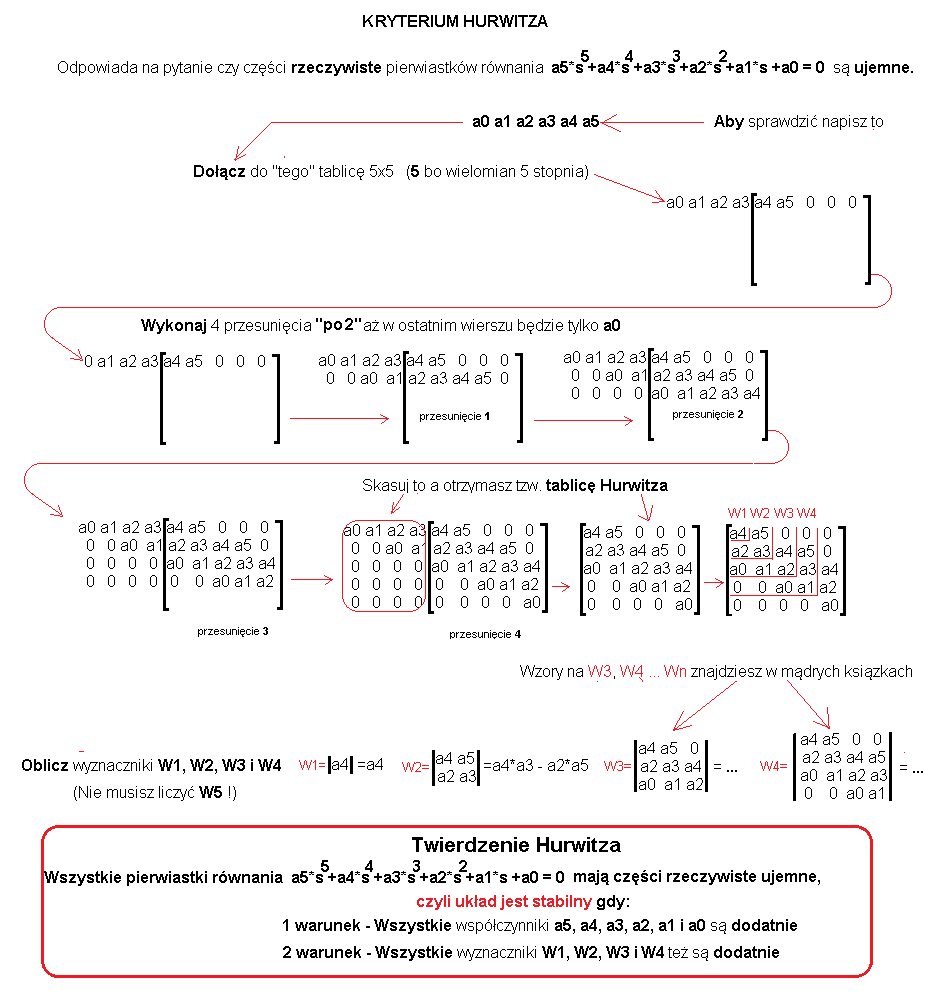
Rys. 20-13
Tak wygląda twierdzenie Hurwitza dla wielomianu 5 stopnia. Analogicznie działa mechanizm dla wielomianu stopnia 6,7,…n.
Radzę stosować takie podejście dla wszystkich wzorów, „które dla dowolnego n„, są po prostu mało przejrzyste. Osobiście sprawdzam je dla konkretnego n, tak jak wyżej dla n=5. Wtedy wszystko „lepiej widać”.
Jeżeli Szanowny Czytelniku jesteś uczniem szkoły średniej, to masz prawo mieć problem z wyznacznikami W1, W2, W3 i W4 .
Podejdź do tego jeża następująco:
– Każda tablica (inaczej macierz) stopnia n ma przyporządkowaną konkretną liczbę zwaną wyznacznikiem stopnia n czyli Wn
– Wyznaczniki W1 i W2 obliczamy jak na w/w rysunku.
Co do następnych wyznaczników tj. W3, W4,…Wn to małpia robota. Podaje je każdy podręcznik rachunku macierzowego.
Rozdz. 23.6 Sprawdzenie stabilności transmitancji „stabilnej” przy pomocy Kryterium Hurwitza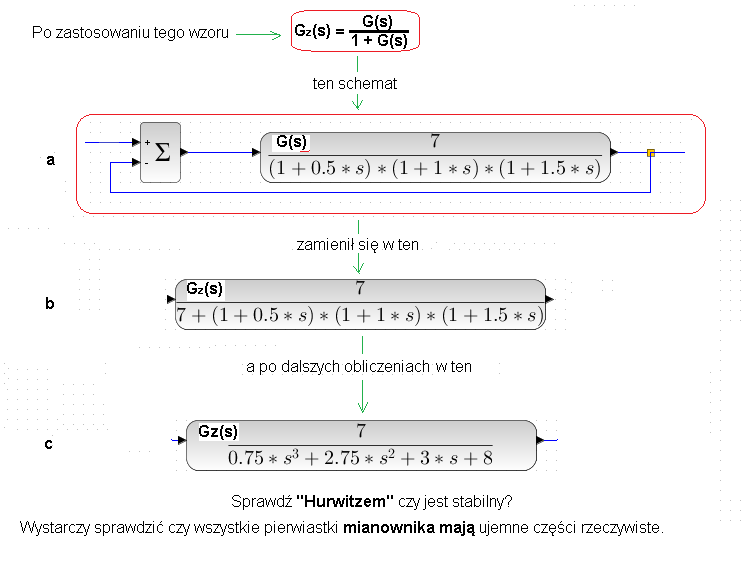
Rys. 20-14
Na a mamy transmitancję G(s) objętą ujemnym sprzężeniem zwrotnym
Na b mamy transmitancję Gz(s) uwzględniającą ujemne sprzężenie zwrotne – bezpośrednio po zastosowaniu wzoru
Na c mamy transmitancję po ostatecznych przekształceniach.
Jak sprawdzić stabilność Gz(s) przy pomocy kryterium Hurwitza?
Pamiętamy, że pana Hurwitza interesuje tylko mianownik transmitancji Gz(s) a licznik olewa.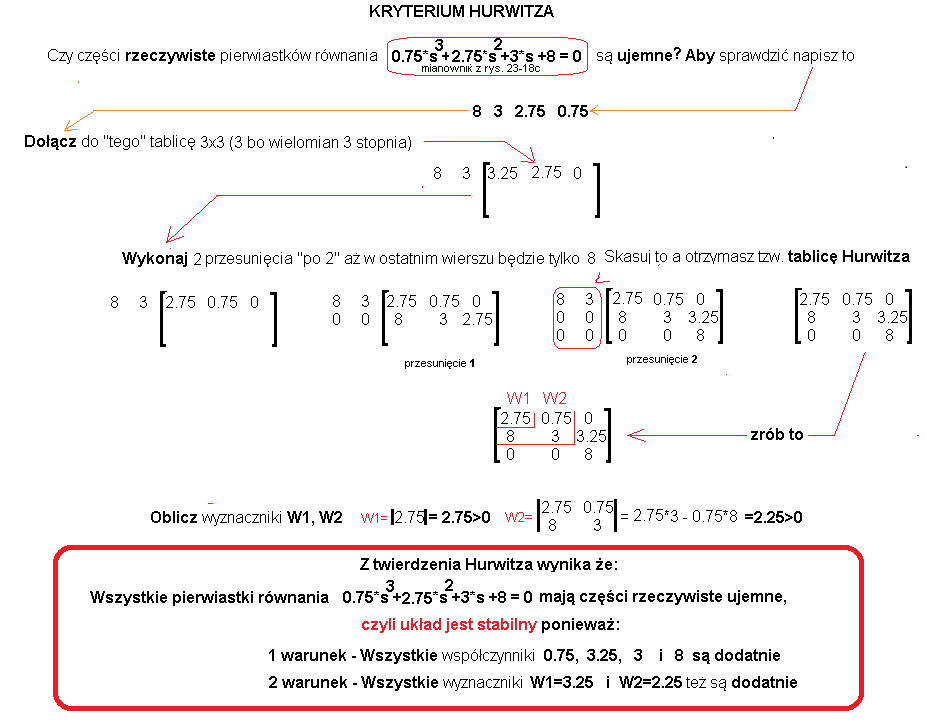
Rys. 20-15
Dobrze, że nie musisz liczyć wyznacznika W3 w 2 warunku, trochę mniej roboty.
Obydwa warunki Hurwitza są spełnione –>części rzeczywiste pierwiastków z mianownika transmitancji z Rys. 23-18c są ujemne–> transmitancja jest stabilna. A może sprawdzimy?Jest to dokładnie Gz(s) z Rys. 20-14c. Zbadamy stabilność lekko stukając młotkiem diraca. Czy wróci do stanu ustalonego tzn do y(t)=0, tak jak obiecał Hurwitz?
Rys. 20-16
Zadyndało i system wrócił do stanu stabilnego w którym y(t)=0.
Jeszcze jedno. Hurwitz nic nie mówi czy pierwiastki równania M(s)=0 są rzeczywiste lub zespolone. Ściślej, czy mają części urojone. Z oscylacji wynika, że niektóre mają. Nie mówi także, jak bardzo układ jest stabilny. Jak daleko mu do niestabilności.
Rozdz. 23.7 Sprawdzenie stabilności transmitancji „niestabilnej” przy pomocy Kryterium Hurwitza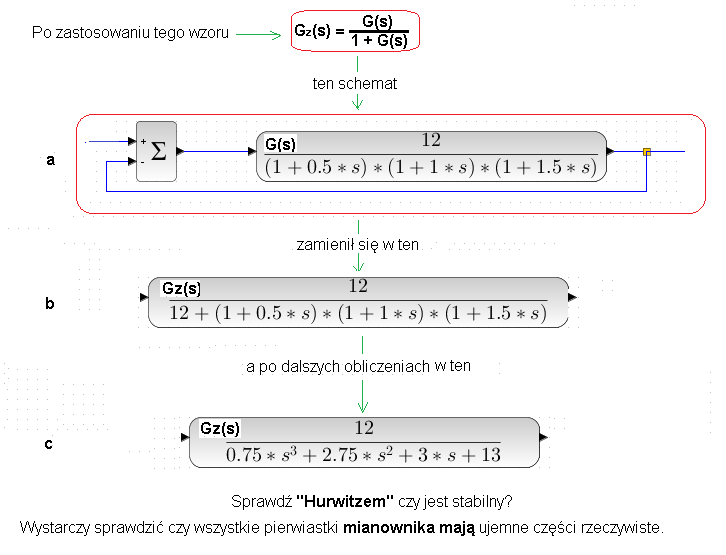
Rys. 20-17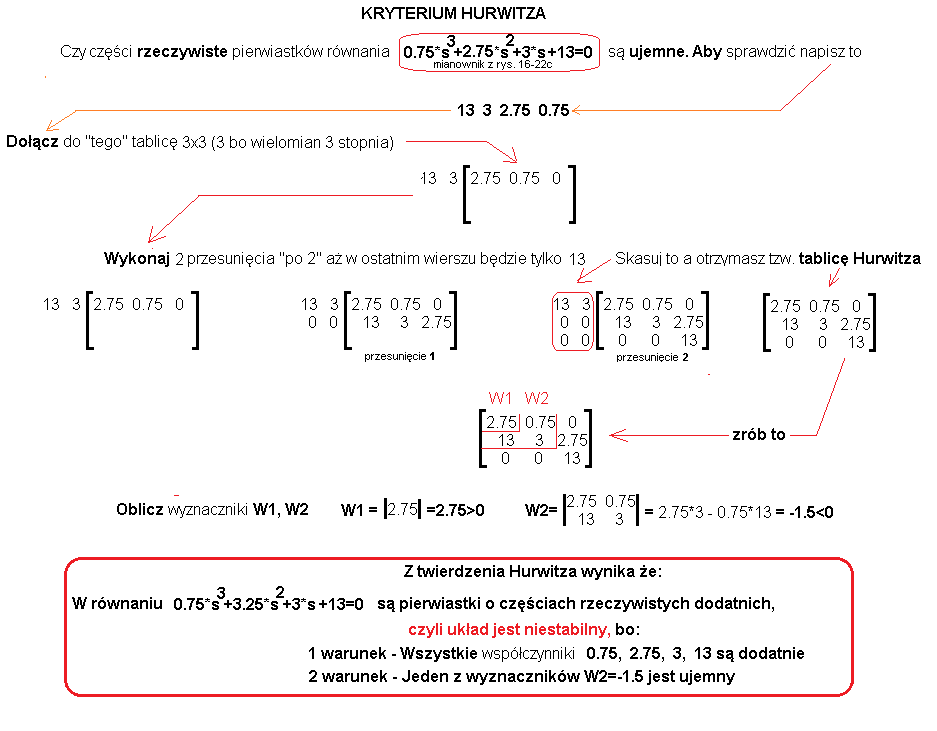
Rys. 20-18
2 warunek Hurwitza nie jest spełniony, czyli układ jest niestabilny. Sprawdźmy to.
Rys. 20-19
Jest to dokładnie Gz(s) z Rys. 20-17c Spróbujmy wytrącić układ z równowagi młotkiem Diraca?
Rozhuśtało się, rozhuśtało. Hurwitz miał rację.