Scilab
Rozdział 12 XCOS-Transmitancje, rachunek operatorowy i równania różniczkowe
Rozdział 12.1 Wstęp
W rozdz.11 poznaliśmy podstawowe człony dynamiczne. Pojawiła się tzw. transmitancja G(s). Jest to rozszerzenie pojęcia wzmocnienia K. Kojarzysz już G(s) z jego odpowiedzią np. na skok jednostkowy. I tak w członie Inercyjnym G(s)=K/(1+sT) wiesz co robią parametry K i T. A samo s? Co za diabeł? Przy pierwszym podejściu możesz pominąć temat. Po prostu jest i tyle. A G(s) to takie coś, co reaguje tak, a nie inaczej na skok albo piłę. Poważniejsze spojrzenie na G(s) to jako na wzmocnienie K zależne od częstotliwości sinusoidy wprowadzonej na wejście. Swego rodzaju pasmo przenoszenia. W członie proporcjonalnym G(s)=K relacja jest prosta y(t)=K*sin(ωt). Dla każdej częstotliwości/pulsacji wzmocnienie K jest stałe. Także sinusoida y(t) jest w fazie z sin(ωt). Natomiast dla “prawdziwego” G(s), którym rządzą równania różniczkowe, amplituda i faza sinusoidy zmieniają się z częstotliwością. Zwykle amplituda maleje, a faza się opóźnia.
Więcej znajdziesz w kursie Podstawy Automatyki rozdz.18.
Rozdział 12.2 Transmitancja G(s) a równanie różniczkowe
Rozdział 12.2.1 Wstęp
Czym jest s w transmitancji G(s)? W rachunku operatorowym-inaczej, w przekształceniach Laplace’a, każdej funkcji czasu f(t) odpowiada jej transformata F(s) i odwrotnie tzn. f(t)<==>F(s).
Np. dla skoku jednostkowego 1(t)<==>1/s.
Rachunek operatorowy ma jedną fajną cechę
Jeżeli f(t)<==>F(s) to f'(t)<==>s*F(s)
Czyli transformata pochodnej f'(t) jest iloczynem s*F(s).
Gdyby nie miał tej cechy, to nie byłoby rachunku operatorowego.
O ile nie da się zapisać prostej relacji w jakimś obiekcie jako zwykłe y(t)/x(t) (bo byłoby zmienne w czasie t), to da się jako stosunek 2 transformat G(s)=y(s)/x(s)
Rozdział 12.2.2 Człon inercyjny a równanie różniczkowe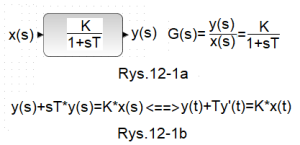
Rys.12-1
Relacja między równaniem różniczkowym a transmitancją G(s) członu inercyjnego.
Rys.12-1a
Transmitancja G(s) członu Inercyjnego jako G(s)=y(s)/x(s)=K/(1+st)
Rys.12-1b
Relacja między równaniem operatorowym Członu Inercyjnego a jego równaniem różniczkowym.
Rozdział 12.2.3 Bardziej fikuśna transmitancja a równanie różniczkowe
Wykazaliśmy już , że obiektowi opisanemu prostym równaniem różniczkowym
K*x(t)=T*y'(t)+y(t)
odpowiada transmitancja G(s) członu inercyjnego o parametrach K i T.
Poniższy rysunek pokazuje jak tworzona jest transmitancja przy bardziej skomplikowanym równaniu różniczkowym np.3 stopnia.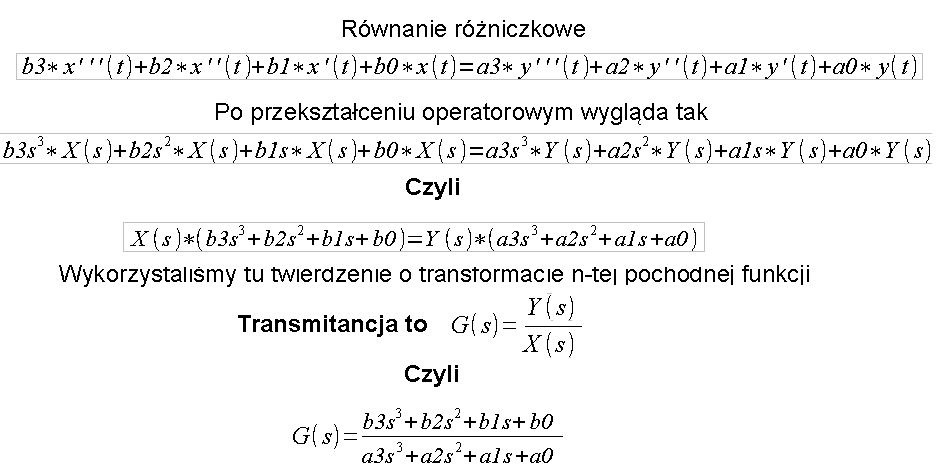
Rys. 12-2
Widzimy więc, że transmitancja G(s) jest ilorazem gdzie licznik L(s) i mianownik M(s) to wielomiany odpowiednich stopni. Przeważnie L(s) ma niższy stopień niż M(s) a najczęściej to tylko L(s)=bo, w dodatku bo=1 a mianownik jest iloczynem wielomianów pierwszego lub drugiego stopnia.
W sposób analogiczny będzie tworzona transmitancja na podstawie równania różniczkowego dowolnego stopnia.
Sprawdźmy odpowiedź na skok transmitancji z Rys. 12-2 przy konkretnych parametrach mianownika M(s) i licznika L(s).
M(s)–> a0,a1,a2,a3
L(s)–> b0,b1,b2,b3
Rys. 12-3
Widzimy jak wyższe pochodne mieszają w przebiegu czasowym. Zwłaszcza, że współczynniki przy tych pochodnych są małe. A co by było gdyby były duże. Strach pomyśleć!
Dla większości transmitancji łatwo można wyznaczyć wzmocnienie K w stanie ustalonym. Jest to po prostu wyraz wolny bo w liczniku transmitancji, przy założeniu że wyraz wolny w mianowniku ao=1. Jeżeli ao jest różne od 1 to podziel licznik i mianownik przez ao.
Oczywiście tak jest, gdy G(s) dotyczy układów stabilnych. Nie takich w których dowolne zakłócenie powoduje, że G(s) staje się generatorem. Sporo wiesz o odpowiedzi transmitancji G(s) skok jednostkowy 1(t).
Wyjście y(t=2)=0, co jest oczywiste, oraz, że w stanie ustalonym y(t)=bo=K.
Ale co się dzieje w stanie przejściowym („pomiędzy”), czyli dla t=2…15sek? Za to odpowiadają pozostałe parametry transmitancji. Są to współczynniki a1, a2, a3 i b1, b2, b3, których konkretne wartości widoczne są w transmitancji G(s) na Rys. 12-3