Podstawy automatyki
Rozdz. 10 Człon opóźniający i transmitancja zastępcza
Rozdz. 10.1 Człon opóźniający
Rozdz. 10.1.1 Wstęp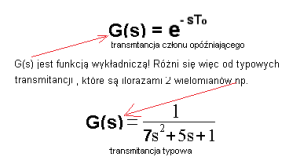
Rys. 10-1
Transmitancja członu opóźniającego w porównaniu do transmitancji typowej .
Człon opóźniający tylko opóźnia sygnał o czas To, nie zmieniając jego kształtu. Trudno jest o przykład. Może echo? Albo taśmociąg na który podawany jest piasek skądś tam. Jeżeli wejście to poziom piasku na początku taśmociągu, to na końcu taśmociągu poziom będzie taki sam, ale z pewnym opóźnieniem To.
Generalnie to prawie każdy obiekt dynamiczny wprowadza pewne opóźnienie sygnału wyjściowego względem wejściowego, lecz jest ono zniekształcone przez jego bezwładność, inaczej inercję. Za to człon opóźniający to czyste opóźnienie. Przydatny jest do tworzenia transmitancji zastępczej której dotyczy druga część rozdziału.
Rozdz. 10.1.2 Człon opóźniający z suwakiem i bargrafem
Jest to złośliwy karzeł który przedrzeżnia Ciebie z opóźnieniem To=5 sek
Rys. 10-2
Człon odtwarza stan suwaka z opóźnieniem To=5 sek. Widać to po ruchach suwaka i bargrafa, a także na miernikach cyfrowych.
Czyli jego transmitancja to:
Rys. 10-3
Transmitancja typowa to ułamek G(s)=L(s)/M(s), gdzie L(s) i M(s) to wielomiany . Tylko człon opóźniający, jako funkcja wykładnicza nie podpada pod tę kategorię! Wygląda dość przerażająco. Nie dość że funkcja wykładnicza, to jeszcze w potędze liczba zespolona s. Nie przejmuj się tym! Traktuj człon opóźniający jako coś, co przesuwa nam sygnał wejściowy o czas, tu To=5sek
Rozdz. 14.1.3 Człon opóźniający z suwakiem i oscyloskopem
Właściwości członu opóźniającego jeszcze lepiej widać na oscyloskopie
Rys. 10-4
Wyjście y(t) dokładnie odtwarza wejście x(t) z suwaka z opóźnieniem To=5 sek. Nic więcej do dodania.
Rozdz. 10.2 Transmitancja zastępcza
Rozdz. 10.2.1 Wstęp
Rys. 10-5
Transmitancja zastępcza składa się z członu inercyjnego i opóźniającego. Wiele powszechnie stosowanych członów dynamicznych ma charakter wieloinercyjnych zwłaszcza w przemyśle chemicznym. A te z kolei dają się przybliżyć jako transmitancje zastępcze.
Występują w niej tylko 3 parametry:
k – wzmocnienie w stanie ustalonym
T – stała czasowa członu inercyjnego
To – opóźnienie.
Ma to znaczenie dla optymalnych nastaw regulatora PID. Są wzory które dla parametrów obiektu k,T i To wyznaczają optymalne nastawy Kp, Td i Ti regulatora PID. Zajmiemy się tym w rozdziale 26.
Pamiętajmy, że transmitancja zastępcza jest tylko przybliżeniem tej prawdziwej.
Rozdz. 14.2.2 Wyznaczanie parametrów transmitancji zastępczej na podstawie odpowiedzi na skok
Transmitancja zastępcza przybliża człony wieloinercyjne. Znajdźmy ją np. dla członu trójinercyjnego. Przeważnie wyznaczenie parametrów k, T1,T2 i T3 na podstawie odpowiedzi na skok jest dość skomplikowane
Rys. 10-6
Na rysunku pokazano jak transmitancję członu trójinercyjnego zastąpić transmitancją zastępczą na podstawie odpowiedzi na skok.
Narysuj trójkąt prostokątny którego przeciwprostokątna jest styczna do odpowiedzi y(t) w jej punkcie przegięcia*. Wyznaczenie parametrów znormalizowanych T=6.2 sek i To=1.8 sek jest na rysunku oczywistą oczywistością. Parametr k=y/x=1 to wzmocnienie w którym y(t)=y=1, czyli w stanie ustalonym po czasie t=28sek.
Po co w ogóle jest ta transmitancja zastępcza? Przecież najlepszym przybliżeniem transmitancji jest ona sama.
Po pierwsze
Często obiekt, którym może być zbiornik w którym coś się miesza i zachodzą reakcje chemiczne, nie jest rozpracowany matematycznie. Czyli nie znam jego transmitancji. Natomiast wyznaczenie odpowiedzi na skok to małe piwo.
Po drugie
Nawet gdybyśmy znali transmitancję obiektu, to może charakteryzować ją mnóstwo parametrów. Jednym z najważniejszych zadań automatyki to dobranie odpowiednich nastaw regulatora. Tak żeby odpowiedź na skok była najbardziej optymalna pod jakimś względem. Na przykład najkrótszy czas regulacji przy stosunkowo małych oscylacjach. Będzie o tym mowa w rozdz. 27.
Mądrzy ludzie już dawno rozpracowali dobór 3 nastaw Kp, Ti, Td regulatora PID dla różnych kombinacji k, T, To transmitancji zastępczej. Potem dobrali dla tych 3 kombinacji – czyli odpowiedniej transmitancji zastępczej, odpowiednie tabele. Naszym zadaniem jest tylko zidentyfikowanie k, T, To jak na Rys. 10-5 i dobranie parametrów regulatora z tabeli.
Oczywiście trzeba mieć świadomość, że jest to metoda dość „zgrubna”. Przecież jak trochę inaczej narysujemy styczną, to inne będą parametry. Zwłaszcza To które wyjątkowo złośliwie utrudnia sterowanie.
W następnym punkcie porównamy odpowiedź transmitancji badanej oraz zastępczej. Czy różnica będzie duża?
*punkt przegięcia funkcji–> tam gdzie funkcja „przegina się w drugą stronę”. Definicja woła o pomstę do nieba, ale prościej się nie da.
10.2.3 Porównanie transmitancji badanej i zastępczej na podstawie odpowiedzi na skok
Rys. 10-7
Skok jednostkowy x(t) podawany jest na wejście transmitancji badanej (tu trójinercyjnej) i zastępczej.
Identycznych odpowiedzi raczej nie spodziewałem się. Różnią się i to całkiem sporo. Pamiętajmy jednak, że parametry regulatora PID są dla transmitancji zastępczej idealnie dobrane. A to oznacza, że parametry regulatora PID dla transmitancji badanej , choć nieoptymalne, to będą jednak dużo lepsze, niż gdybyśmy próbowali dobrać je w rozsądnym czasie metodą prób i błędów .